 左が腕ロボットで使ったサーボブラケットを使って作ったものです。
出来上がったみると非常に不満足でした。
左が腕ロボットで使ったサーボブラケットを使って作ったものです。
出来上がったみると非常に不満足でした。そこで二足歩行ロボット制作についての書物(吉野耕司著・二足歩行ロボット自作入門・ 毎日コミュニケーションズ・\3,800を)を購入し、この書物を見ながら一から作り直しました。
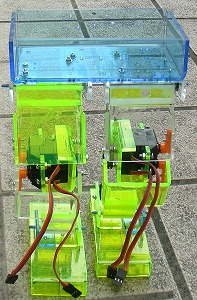
ただ書物のほうはプラスチックの板とアルミを組み合わせて作っています。これをアクリル様に練り直して パーツのサイズを考えるのが大変でした。 二番目以降のものがそれです。
その右のものは後ろから見たものです。 透明なアクリルで作っていますので中身がよく見えます。
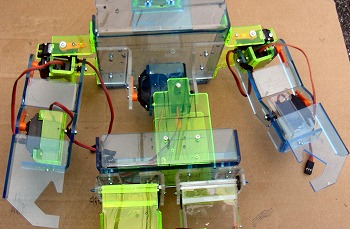
膝の関節のためにモータを2個並べて、それをアクリルで包んでほかのパーツとつなげています。
ここまででもいやあほんとに苦労しています。
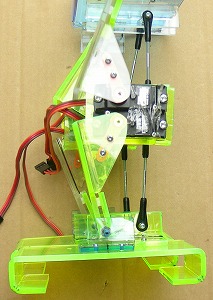

横から見たものです。
動きに「平行リンク」という概念を使っています。
これを使うとひざの関節が曲がっても腰・足が水平に保たれる、ということのようです。
左が膝を伸ばした状態、右が膝を曲げた状態です。
膝を曲げても、腰・膝のモータ・足の3か所が平行(水平)に保たれているでしょ?

 腰には2つのサーボを使います。前後と左右に回転させるためにサーボの軸を直交させます。
このためのブラケットをアクリルで作りました。
腰には2つのサーボを使います。前後と左右に回転させるためにサーボの軸を直交させます。
このためのブラケットをアクリルで作りました。これを2つのサーボに装着したのが右です。
このブラケットは非常に単純な形をしていますが、この形にたどり着くまでに何時間もかかっています。
2つのブラケットを直交させたものをセロテープで固めておいて、それを厚紙で包んで型を作って これを基にしてCADで図面を引いて工作機械で彫って曲げています。
 肩に2個、肘に1個の計3個使います。
肩に2個、肘に1個の計3個使います。肩のほうは、腕全体の上げ下げと前後動に使いますのでサーボの軸を垂直に配置します。
肩に使うサーボ2個のブラケットは左のようにアクリルを切り取ってそれを折り曲げてサーボを包みます。
肘のサーボのブラケットは1個を包むだけなので簡単です。
上腕と下腕部分はやはりアクリルでそのような形に工作します。
胸に当たる部分の箱を作り、これらをくっつけて、脚の部分と合わせるとこのようになります。

顔を加えた全体はこのようです。
顔にはLEDを3個配置しました。
「動くとLEDが光る」というイメージです。
家の外のマンホールの上に立った状態です。
これが動くまでにはまだまだかなりの時間がかかりそうです。
電子回路のほうは、これからぼちぼち考えます・・・・(笑)。
しかし、動くと楽しいですね・・・・。
→ 部品の選択ミスで動かず
2号の制作(2011年7月~9月)
①サーボの電源が乾電池では役不足であったこと、②使っているサーボが電力を食いすぎること、この二つがその理由です。 吉野さんのサイトに「SRM102というサーボが使える」と書いてあったのでこれに替えます。腰のサーボには吉野さんの 著書に書いてある通りのERG-VR、ERG-VGを使います。
当初は、完成してある体はそのまま使って、前のサーボをこれらの新しいサーボにそっくりそのまま交換しようと 思っていました。
しかし、新しいサーボが前のサーボより大幅にサイズが大きいのですでにある体は使えません。
しかたなく体をすべて新しく作りなおすことにしました。いろいろな部分で発想を練り直して作りました。