��ԃ��{�b�g�Ƃ́A��ԂɃ}�C�R�����ڂ��āA���[�^�[�A�Z���T�[�����A��Q���ɂԂ��肻���ɂȂ�ƌ�����ς��Ă܂������o���B
�Ƃ����悤�Ȃ��̂��C���[�W���ĂƂ肩�������B
�@���āA��Ԃɉ����g�������H�@�Ԃ͂ǂ����璲�B�H�@���[�^�[�͂ǂ�Ȃ��̂��H�@�Z���T�[�͂ǂ�Ȃ�H
���_�͎R�ς݂ł��B
�����̑�ԥ�ԂƂ��̓l�b�g�Œ��ׂĂ����ƁA�^�~���͌^�̂�������f�ނ��g���邱�Ƃ��킩�����B���x�͂ǂ��ōw�����悤���H�@�Ƃ������ƂɂȂ�܂�
�l�b�g�Œ��ׂĂ����ƁA��V�d�@��Web�T�C�g�Ŕ����邱�Ƃ��킩�����B�����ŋߏ��̏�V�d�@�ɓ����Ă݂�ƁA��V�d�@�̃L�b�Y�����h �ɂ����Ȃ�������̑f�ނ����ׂĂ������B�@�����I
.jpg) ��Ԃ��w�����āA�g�W�i�R�O�T�Q�j�̊�Ղ��悹�Ă݂�Ɗ����Ԃɔ�ׂđ傫�����܂����B���ꂪ���̎ʐ^�ł����A
�P�P�O�����~�P�T�T��������܂��B
��Ԃ��w�����āA�g�W�i�R�O�T�Q�j�̊�Ղ��悹�Ă݂�Ɗ����Ԃɔ�ׂđ傫�����܂����B���ꂪ���̎ʐ^�ł����A
�P�P�O�����~�P�T�T��������܂��B���Ȃ肠�ƂɂȂ��Ă킩��̂ł����A���̂h�n�{�[�h�͊w�K�p�{�[�h�ł��邽�߂ɑ傫���̂ł����āA�b�o�t�{�[�h�����̑傫���͖��h��� �傫���ł���Ƃ������Ƃł��B�h�n�{�[�h�������O�ʼn��Ƃ��ł�����̂b�o�t�̂ق��������킯�ł��B �ʐ^�̑傫���{�[�h�i�h�n�{�[�h)�̏�ɍڂ��Ă���̂��b�o�t�{�[�h�ł��B�߂������ȓd�q�H����n�߂����S�҂ł��̂ł��� �Ȃ��Ƃ͂킩��͂�������܂���B�g�W�i�R�O�T�Q�j�͑傫������I �ق��̏����Ȃ��̂Ɋ����悤�I�@�Ƃ������ƂŐ�ɓ˂��i�݂܂��B
 ���ꂾ���ő�Ԃ̃X�y�[�X�͈�t�ł��B����ɂk�d�c�E�Z���T�[�E���[�^�h���C�u�h�b�Ƃ����ԏ�ɏ悹��K�v������܂��B
���ꂾ���ő�Ԃ̃X�y�[�X�͈�t�ł��B����ɂk�d�c�E�Z���T�[�E���[�^�h���C�u�h�b�Ƃ����ԏ�ɏ悹��K�v������܂��B�ق��ɓd�r���K�v�ł��B
�H���d�q�̃l�b�g�Œ��ׂ�Ƃg�W�^�C�j�[�Ƃ����}�C�R���{�[�h������܂����B���̃T�C�Y�̏��������Ƃɂق�� �b�o�t������Ɋ����܂����B
�g�W�^�C�j�[�Ƃ������O�����ɔ��ɏ������ł����B�h�n�{�[�h���݂łT�O�����~�V�O�����قǂ̑傫���ł��B���̎ʐ^������ŁA�ʐ^�̉E�̂��̂� �b�o�t�{�[�h�݂̂̂��̂ł��B�b�o�t�{�[�h�݂̂��Ƃ���ɏ������Ȃ�܂��B
���̃L�b�g��g�ݗ��ĂāA�k�d�c�E�Z���T�[�E���[�^�[�h���C�u�h�b�E���[�^���Ȃ��Ă������ƂɂȂ�܂��B
 ���̐}���g�W�^�C�j�[�i�R�U�U�S�j�̂h�n�|�[�g�̊T�v�ł��B
���̐}���g�W�^�C�j�[�i�R�U�U�S�j�̂h�n�|�[�g�̊T�v�ł��B�����̎l�p�����̂����̂b�o�t�{�[�h���B�R�l�N�^���b�m�P�Ƃb�m�Q�̂Q����܂��B���ꂼ��Ƀs�����Q�U����܂��B
���̐}�̉��Ƀ|�[�g�̔ԍ��Ƃ��̃|�[�g������R�l�N�^�̑Ή����܂Ƃ߂Ă��܂��B
�|�[�g�͂P�C�Q�C�T�C�V�C�W�ƂT����܂����A�W�s���t���Ɏg����̂͂T�ƂW�����Ȃ̂� �|�[�g�T�ƃ|�[�g�W���g���܂��B
�|�[�g�T�����[�^�[����ɁA�|�[�g�W���k�d�c����Ɏg�����Ƃɂ��܂��B
 �k�d�c���Ȃ��āA��Q���Ƃ̋����ɂ���ĈقȂ�k�d�c�����炻���Ƃ����B
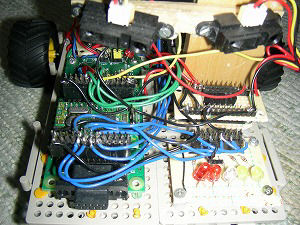
�k�d�c���Ȃ��āA��Q���Ƃ̋����ɂ���ĈقȂ�k�d�c�����炻���Ƃ����B�E�̎ʐ^�̐^�̊���g�W�^�C�j�[�̂h�n�{�[�h�ŁA���̏�ɂg�W�i�R�U�U�S�j�̂b�o�t�{�[�h�� �ڂ��Ă��܂��B
�Z���T�[��O�E�p�ƑO���p�ƂQ����\��ł��B
�O�E�����Ƃ̏�Q���Ƃ̋����A�O�������Ƃ̏�Q���Ƃ̋����ɂ���ĈقȂ�k�d�c�����炻���A�Ǝv���̂ł���悤�ɕʁX �̃{�[�h�ɂT���k�d�c�����܂����B
�E�ʐ^�����̓_�������̂��߂̂��̂ł��B���̂b����v���O�����ɂ���č��E�̂k�d�c�����ԂɌ��炷���Ƃ��ł��܂��B
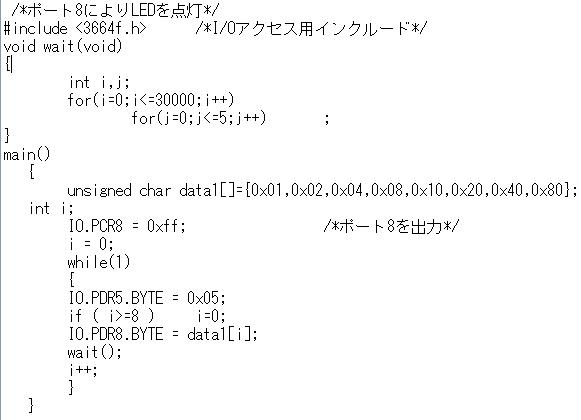
�|�[�g�W���k�d�c�̂��߂̏o�̓|�[�g�Ɏg���Ă��܂��B
�|�[�g�W�͂W�s������܂��̂ŁA���v�W�̂k�d�c�𐧌�ł��܂��B
�ʐ^������킩��悤�ɁA�O���E�O�E�p�ɂ��ꂼ��T�k�d�c���g���Ă��܂��B
�O���p���|�[�g�W�̂O�r�b�g�ڂ���R�r�b�g�ڂ܂ŁA�O�E�p���S�r�b�g�ڂ���V�r�b�g�ڂ܂ŁB
���p���E�p���Ō�̃r�b�g�i�s��)���k�d�c�S�ځE�T�ڂ̗����ɂȂ��Ă��܂��B
main()���̒���data1[]�Ƃ����o�b�t�@�Ō���k�d�c�����߂Ă��܂��B
���ɗ^���Ă���f�[�^�ƌ���k�d�c�Ƃ̊W���ǂ��킩��悤�ɁA�P�U�i�f�[�^���r�b�g�W�J���Ă����܂��B
0x01�F 0000 0001 �@�O�r�b�g�ڂɑΉ������k�d�c������
0x02�F�@0000 0010 �@�P�r�b�g�ڂɑΉ������k�d�c������
0x04�F�@0000 0100 �@�Q�r�b�g�ڂɑΉ������k�d�c������
0x08�F�@0000 1000�@ �R�r�b�g�ڂɑΉ������k�d�c������
�R�r�b�g�ڂ̂��̂���͂Q�̂k�d�c�ɂȂ��Ă��܂��B
�ȏオ�O���̂k�d�c�̂��߂̂��̂ł��B
0x10�F 0001 0000 �@�S�r�b�g�ڂɑΉ������k�d�c������
0x20�F�@0010 0000 �@�T�r�b�g�ڂɑΉ������k�d�c������
0x40�F�@0100 0000 �@�U�r�b�g�ڂɑΉ������k�d�c������
0x80�F�@1000 0000�@ �V�r�b�g�ڂɑΉ������k�d�c������
�V�r�b�g�ڂ̂��̂���͂Q�̂k�d�c�ɂȂ��Ă��܂��B
�ȏオ�O�E�̂k�d�c�̂��߂̂��̂ł��B
�ЂƂ̂k�d�c�������Ă����Ɏ��̂k�d�c������悤�ɂ���ƁA�_�ł����߂��Đl�Ԃ̖ڂɂ͂ǂ̂k�d�c�������Ă��邩�ǂ��킩��܂���B �����łЂƂ̂k�d�c�������Ď��̂k�d�c������܂łɑ҂����Ԃ����܂��B ���̑҂����Ԃ̊���wait���ł��B�v���O�����ł��̑҂����Ԃ�����Ă��܂��B
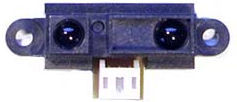
.jpg) �����Z���T�[�Ƃ��ăV���[�v���̂f�o�Q�c�P�Q���g���܂��B����͋����G���V���b�v�̃l�b�g�ʔ̂ōw�����܂����B�Q�Ŗ�\1,500���炢�ł����B
�����Z���T�[�Ƃ��ăV���[�v���̂f�o�Q�c�P�Q���g���܂��B����͋����G���V���b�v�̃l�b�g�ʔ̂ōw�����܂����B�Q�Ŗ�\1,500���炢�ł����B���̂悤�Ȍ`�����Ă��܂��B
�ڋʂ��Q���Ă��܂��B����̖ڋʂ���ԊO���˂��ď�Q������̔��˂���������̖ڋʂŎ܂��B
.jpg) �E�}�̂悤�ɃR�l�N�^���R���Ă��܂��B
�E�}�̂悤�ɃR�l�N�^���R���Ă��܂��B��Q���Ƃ̋����̑����ɂ���ć@�ɂȂ���������̏o�͓d�����ω����܂��B
����̓��o�͓����Ȑ������̐}�ł��B
��������Q���Ƃ̋����A�c�����o�͓d���ł��B
��Q���Ƃ̋������W��������P�O�����̂Ƃ��ɁA�o�̓s�[�N�d�����o�܂��B
���̂��߂ɁA�Z���T�[�Ə�Q���Ƃ̋������W��������P�O�������炢�ɂȂ�悤�ɂ��̃Z���T�[�̎��t���ʒu���l����K�v������܂��B
���邢�̓v���O�����ł��̂���������܂��B
�Ƃ��낪�}�C�R���ŏ������ł���̂̓f�W�^���ł��鐔�l�ł��B
�����ŃA�i���O�ł���d������f�W�^���ł��鐔�l�ɕϊ����邱�Ƃ��K�v�ł��B
�K���ɂ��g�W�i�R�U�U�S�j�ɂ͂��̃A�i���O����f�W�^���ɕϊ�����@�\�ł���`�c�ϊ��@�\���t�����Ă��܂��B
���̋@�\���g���ċ����Z���T�[�f�o�Q�c�P�Q����̏o�͓d���𐔒l�ɕϊ����܂��B
�g�W�i�R�U�U�S�j�̂h�n�|�[�g�����܂��ƁA�b�m�P�̂R�`�P�O�܂ł̃s�����`�c�ϊ��Ɏg�����Ƃ��ł���s���ł��B
�Z���T�[�͑O���p�ƑO�E�p�̂Q�g���Ă��܂��̂ŁA�`�c�ϊ�����s�����Q�K�v�ł��̂ł`�m�O�Ƃ`�m�P�A �s���ł͂b�m�P�̃s���P�O�Ƃb�m�Q�̃s���X���g���܂��B
��H�I�ɂ͑O���p�Z���T�[�̐M���o�̓R�l�N�^�����b�m�P�̃s���P�O�ɁA�O�E�p�̃Z���T�[�̐M���o�̓R�l�N�^�����b�m�P�̃s���X �ɂȂ��܂��B
���̂��Ƃ̓v���O�����ŏ������܂��B
��H�I�ɂ̓Z���T�[�ɂ��Ă͂��łɐ������Ă��܂��B
�k�d�c�̐ڑ��́A�O�ɂ�����k�d�c�����Ƃ܂����������ɂ��܂��B
�܂�A�O���p�ɂ̓|�[�g�W�̂O�r�b�g�ڂ���R�r�b�g�ڂ܂ł̂S�s���A�b�m�Q�̂X����P�Q�ł��B
�O�E�p�ɂ̓|�[�g�W�̂S�r�b�g�ڂ���V�r�b�g�܂ł̂S�s���A�b�m�Q�̂P�R����P�U�ł��B
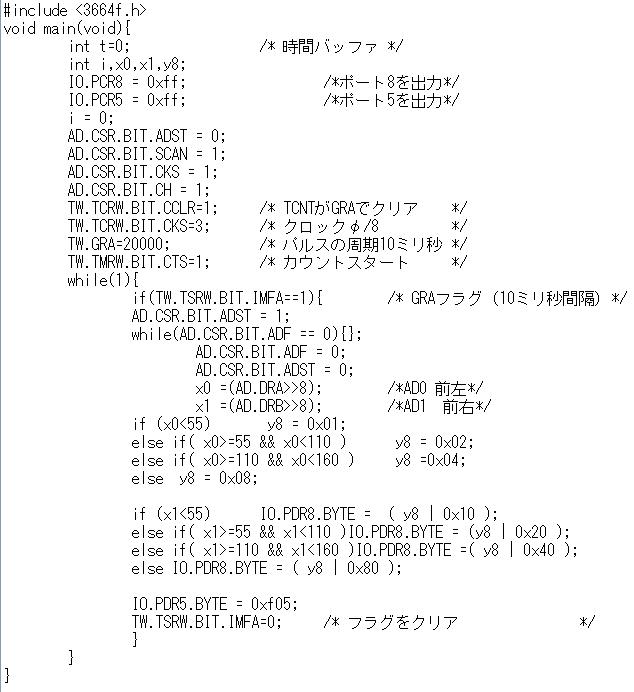
���̂��߂̃v���O���������ɏo���܂��B
���̃v���O�����ł́A�|�[�g�T���o�͂ɐݒ肵�Ă܂��B�|�[�g�T�̓��[�^����̂��߂Ɏg���Ă��܂��B����ɂ��Ă͌�ŏڂ����q�ׂ܂��B
main����while(1)�܂ł��^�C�}�[�@�\�Ƃ`�c�ϊ��@�\���g�����߂̏����ł��B
�`�c�ϊ��@�\�̐��x�͂P�O�r�b�g�ł��B
������O����Q�T�T�܂ł̐��l�ɑe�����Ƃ��܂��B
���̂��߂̃R�[�h��AD.DRA>>8�AAD.DRB>>8�ł��B
x0 = AD.DRA>>8
x1 = AD.DRB>>8
�ɂ��O�������̏�Q���Ƃ̋����ƑO�E�����̏�Q���Ƃ̋������O�`�Q�T�T�ɕϊ�����Ă��ꂼ��x0��x1�Ɋi�[����܂��B
�ŏ��ɑO�������̏�Q���Ƃ̋����ɓ����鐔�l�ɂ���Ăǂ̂k�d�c�����炷���Ƃ������l�����W�Ɋi�[���A���ɑO�E�����̏�Q���Ƃ̋����ɓ����鐔�l ����ǂ̂k�d�c�����炷���̐��l�ƃr�b�g�I�ɂn�q���������邱�Ƃɂ��A�|�[�g�W�̂��ׂĂ̂k�d�c�ɂ����鐔�l���o�C�g�f�[�^�ŗ^���Ă��܂��B
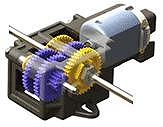
 �ԗւ������߂̃��[�^�̓^�~���̂c�b���[�^�A�S���N�����N�M���{�b�N�X���g���܂����B
�ԗւ������߂̃��[�^�̓^�~���̂c�b���[�^�A�S���N�����N�M���{�b�N�X���g���܂����B�c�b���[�^�͒[�q���Q���肻�̂Q�̒[�q�ɓd�r�̃v���X�ƃ}�C�i�X�̒[�q������Ɖ�]���܂��B�v���X�ƃ}�C�i�X���t�ɂ���Ƌt�ɉ�]���܂��B
�Ƃ������Ƃ͑�Ԃɂ���ƑO�����ɐi�݁A�t��]�Ō������ɐi�݂܂��B
�������A���̒[�q���t�ɕt����A�Ƃ������Ƃ��蓮�ł���̂͌����I�ł͂���܂���B
 ���̂��߂̍ł��ȒP�ȕ��@�̓��[�^�h���C�o�h�b���g�����Ƃł��B���[�^�h���C�o�h�b�Ƃ����Ă������Ȃ��̂�����܂��B
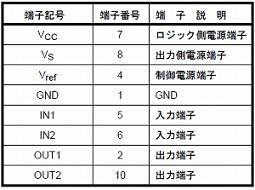
���̂��߂̍ł��ȒP�ȕ��@�̓��[�^�h���C�o�h�b���g�����Ƃł��B���[�^�h���C�o�h�b�Ƃ����Ă������Ȃ��̂�����܂��B�{��ǂނƍł��悭�g���Ă����̂��s�`�V�Q�X�P�o�ł��B�悭�킩��܂���ł������A�����i�Q�Ł��R�O�O�j�Ȃ̂ł�����g���܂����B �s�`�V�Q�X�P�o�̒[�q�͑S���łP�O����܂��B���̕\�����Ă��炢�܂��ƁA�P����P�O�܂ł̒[�q�ԍ��ɂ��Ă̐���������܂��B �[�q�ԍ��R�ƂX�͂m�b�Ƃ����Ďg�p���܂���B�P�Ԃ���P�O�Ԃ܂ł��[�q������܂����A�E��̐}�łP�O�̃s���łǂ��炩�琔���ĂP�ԂQ�� ���Ƃ����ƁA�������č�������i�茇���̂����)�P�ԂƐ�����B
��ʓI�ɂ͂u�����u�������ɂ��܂��B
�u�b�b�ɂ̓}�C�R������̂T�u�o�̓s�����Ȃ��܂��B
�u�r�A�u�������ɂ͈��肵���d�������������̂ŊO���d������̓d�����Ȃ��܂��B���[�^�h���C�o�h�b�̓����ł̓Q�[�g���P�ʂ�܂��B �ЂƂʂ邽�тɂP�u�̓d�����ʂ�����܂��̂łP�u�̓d�����ʂ�����Ƃ��ĂR�D�T�u�̓d����������悢�ƍl���ĂS�D�T�u�i�d�r�R�j �̓d�r�ɂȂ��܂��B
 �n�t�s�P�A�n�t�s�Q����̏o�͂����[�^�[�q�ɂȂ��܂��B
�u�|�[�g�T�����[�^����Ɏg���v�Ɗ��Ɍ����܂����B
�n�t�s�P�A�n�t�s�Q����̏o�͂����[�^�[�q�ɂȂ��܂��B
�u�|�[�g�T�����[�^����Ɏg���v�Ɗ��Ɍ����܂����B���[�^�h���C�o�h�b�̂T�A�U�ԃs�����M�����͒[�q�h�m�P�C�h�m�Q�ɂȂ��Ă��܂��B
���̂h�m�P�A�h�m�Q�ɂg�W�i�R�U�U�S�j����̐���M���𗬂��܂��B
����M���𗬂����߂̃|�[�g�Ƃ��ă|�[�g�T���g���܂��B
�h�m�P�C�h�m�Q�ɂȂ��ƁA�h�m�P�i�|�[�g�T�̃s���O�j�ɂP�A�h�m�Q�i�|�[�g�T�̃s���P�j�ɂO �𗬂��Ɛ��]�i�O�i�j�A�h�m�P�ɂO�A�h�m�Q�ɂP�𗬂��Ƌt�]�i��i)���܂��B
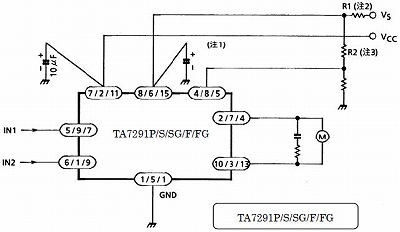
���}�͂s�`�V�Q�X�P�o�̃��[�J�[�̎���ɍڂ��Ă�����̂ł����A��H�̊�{�I�Ȑڑ����@�ł��B
�s�`�V�Q�X�P�o�ЂƂŃ��[�^�P���A�܂�ԗւЂƂ��ł��B
���ۂɂ͎ԗւ͂Q����܂��̂ł��̑g�ݍ��킹���Q�g����킯�ł��B
�����ŁA�|�[�g�T�̃s���O�ƃs���P�����ԗ֗p�̐M���𗬂��A�|�[�g�T�̃s���Q�ƃs���R���E�ԗ֗p�̐M���𗬂����Ƃɂ��܂��B
�s�`�V�Q�X�P�o�̓��͐M���͂h�m�P���P�A�h�m�Q���O�őO�i�ł��̂ŁA
���ԗւ̑O�i�͂o�T�O���P�C�o�T�P���O�A�E�ԗւ̑O�i�͂o�T�Q���P�A�o�T�R���O�ɂȂ�܂��B
��ԑS�̂��l����ƁA�O�i�͍��ԗւ��E�ԗւ��Ƃ��ɑO�i�Ȃ̂ło�T�O���P�A���T�P���O�C�o�T�Q���P�C�o�T�Q���O�B
���̂悤�Ƀ|�[�g�T�̉��ʂS�r�b�g���ԗւ̐���̂��߂Ɏg���܂��B��ʂS�r�b�g�͎g���܂���̂ŏ�ɂO�ɂ��Ă����܂��B
����ƑO�i�����邽�߂ɂ́A�|�[�g�T�ɑ��ĂO�O�O�O�@�O�P�O�P�A�P�U�i���ōl����ƂO���O�T��^����������ƂɂȂ�܂��B
�����悤�ɍl���Ē�~�i�u���[�L�j������ɂ́A�O�O�O�O�@�P�P�P�P�@�P�U�i���ł͂O���O�e��^���܂��B
�E�̂ق��Ɍ�i�����鎞�́A���ԗւ���i�i�o�T�O���O�A�o�T�P���P�j�A�E�ԗւ��~�i�o�T�Q���O�A�o�T�R���O�j����������ł��̂ŁA �O�O�O�O�@�O�O�P�O�@�P�U�i���ł͂O���O�Q��^���܂��B
�R�U�U�S�̃^�C�}�[�@�\�ɂ��P�O�������ɋ����Z���T�[����̐M���d�����Ď����āA���̓d���̑����ɂ���Ăk�d�c�Ǝԗւ𐧌䂵�Ă��܂��B
�ϐ�mode���P�i�O�i�j�A�Q�i��~�j�A�R�i�E��i�j�ƍl���Amode�̏����l���P�i�O�i�j�ɂ��܂��B
�ϐ�moveflag�̒l���O�i�i�s�����ɕω��Ȃ��j�ƂP�i�i�s�����ɕω�����j�̒l���l���āA�O���̏�Q���Ƃ̋����A�O�E�Ƃ̏�Q���Ƃ̋����ɂ���� ��Q���Ƃ̋������������Ȃ�������moveflag�̒l���P�ɂ��āAmode�̒l��ω������Ă���mode�̒l�ɂ���Ď��̓��������߂Ă��܂��B
 �o���オ������ԃ��{�b�g������ł����A�V���o�j�A�t�@�~���[�̃N�}�����������Ă��܂��B
�o���オ������ԃ��{�b�g������ł����A�V���o�j�A�t�@�~���[�̃N�}�����������Ă��܂��B
�Ȃ��A�N�}����Ȃ̂��I�@�Ƃ����Ƒ�Ԃ̂ǂ������O��ォ�ʂ��Ȃ������ł��傫�ȗ��R�ł��B
�悭���Ă��炤�Ƃ킩��̂ł����A�����Z���T�[���Q���Ă��܂��B�ЂƂ͑O���̏�Q���̌��o�A�����ЂƂ͑O�E�̏�Q���̌��o�Ɏg���Ă��܂��B
��Ԃ̑O��ɂk�d�c���T�����Ă��܂��B�O���Ƃ̏�Q���Ƃ̋����A�O�E�Ƃ̏�Q���Ƃ̋����ɂ���Č���k�d�c��ω������Ă��܂��B