/***************************************/
/* ワイヤレスコントローラ wcontroll.c */
/***************************************/
void itu0_wait_init(void);
void itu1WaitMsec(int msec);
void itu1WaitMicro(int kkk);
#include "3048f.h"
#include "lcd1.h"
int remocon_mode1(void);
/*関数宣言*/
void rc_read(unsigned char *cmdData,unsigned char *swData);
void rc_select(unsigned char status);
void rc_io(unsigned char out_data, unsigned char *in_data);
char *numToHexa(int num,char *ss);
char *numToString(int su,char *s);
char *numToBinary(int su,char *s);
int DomainInBig(int domain,int k1,int k2,int x,int y);
int DomainInSmall(int domain,int k1,int x,int y);
/*数値をバイナリ文字列に変換する関数*/
char *numToBinary(int su,char *s)
{
int i,k,ret,num,num1,num2,len;
char s1[25];
for(i=1;i<=20;i++) s1[i-1] = 0x20;
s1[20]=0;
k=1;
num = su;
while(1){
num1 = num % 2 +'0';
s1[20-k]=num1;
num1 = num /2;
num = num1;
if(num1<1) break;
k++;
}
strcpy(s,s1+20-k);
return (s);
}
char *numToHexa(int num,char *ss)
{
int i,k,num1,num2;
char s1[10],s2[10];
num1 = num/16;
num2 = num % 16;
strcpy(s1," ");
strcpy(s2," ");
if(num1>=10) num1 = num1-10+'A';
else num1 = num1+'0';
s1[0] = num1;
if(num2>=10) num2=num2-10+'A';
else num2=num2+'0';
s2[0] = num2;
strcpy(ss,"0x");
strcat(ss,s1);
strcat(ss,s2);
return ss;
}
char *numToString(int su,char *s)
{
int i,k,ret,num,num1,num2,len;
char s1[25];
for(i=1;i<=20;i++) s1[i-1] = 0x20;
s1[20]=0;
k=1;
num = su;
while(1){
num1 = num % 10 +'0';
s1[20-k]=num1;
num1 = num /10;
num = num1;
if(num1<1) break;
k++;
}
strcpy(s,s1+20-k);
return (s);
}
/* 待ち時間発生初期化 *********************************/
void itu0_wait_init(void){
/* ITU0、1のクロックを8分週 */
/* 3125:1ms、4687.5:1.5ms、6250:2ms、62500:20ms*/
ITU0.TCR.BYTE = 0x03; /* ITU0、TCNTクリア禁止 clock 1/8 */
ITU1.TCR.BYTE = 0x03;
/* ITU1、TCNTクリア禁止 clock 1/8 */
ITU.TSTR.BIT.STR0 = 0; /* ITU0 TCNTカウント停止 */
ITU.TSTR.BIT.STR1 = 0; /* ITU1 TCNTカウント停止 */
return;
}
/* 待ち時間発生 引数に必要なミリ秒を指定する*************/
void itu1WaitMsec(int msec){
ITU.TSTR.BIT.STR1 = 1; /* ITU1 TCNTカウント開始 */
ITU1.TCNT = 0;
while(ITU1.TCNT <3125*msec);/*msec second経過するまで待つ*/
ITU.TSTR.BIT.STR1 = 0; /* ITU1 TCNTカウント停止 */
return;
}
/* 待ち時間発生 μ秒指定*************/
void itu1WaitMicro(int kkk){
double k;
k = ((double)kkk)*3.125;
ITU.TSTR.BIT.STR1 = 1; /* ITU1 TCNTカウント開始 */
ITU1.TCNT = 0;
while(ITU1.TCNT < (int)k);/*kkk μ秒経過するまで待つ*/
ITU.TSTR.BIT.STR1 = 0; /* ITU1 TCNTカウント停止 */
return;
}
/********************************************************/
/* リモコンコントローラのボタン等の操作状態を読み取る */
/* 引数:ACTION構造体へのポインタ */
/* 返値:なし */
/********************************************************/
void rc_read(unsigned char *cmdData,unsigned char *swData)
{
unsigned char i, j;
/*CMD Pin リセット*/
P5.DR.BYTE= P5.DR.BYTE & 0xfe;
/*選択*/
rc_select(1);
itu1WaitMicro(500); /*500μ秒待つ*/
/*ボタンの状態読み取り*/
for(i = 0; i < 5; i++)
{
rc_io(cmdData[i], &swData[i]);
itu1WaitMicro(10); /*10μ秒待つ*/
/* j = rc_ack();*/
}
/*ジョイスティックの状態読み取り(アナログモード時のみ)*/
if(swData[1] == 115)
{
for(i = 5; i < 9; i++)
{
rc_io(cmdData[i], &swData[i]);
itu1WaitMicro(10); /*10μ秒待つ*/
/* j = rc_ack();*/
}
}
itu1WaitMsec(10); /*10m秒待つ*/
/*非選択*/
rc_select(0);
/*CMD Pin リセット*/
P5.DR.BYTE = P5.DR.BYTE & 0xfe;
}
/******************************************************/
/* セレクトピンの状態を操作する */
/* 引数:status 選択/非選択状態 */
/* 返値:なし */
/******************************************************/
void rc_select(unsigned char status)
{
if(status == 1) P5.DR.BYTE = P5.DR.BYTE | 0x02;/*パッドに Low 送信 ・・・ 選択*/
else P5.DR.BYTE = P5.DR.BYTE & 0xfd;/*パッドに High 送信 ・・・ 解除*/
}
/******************************************************/
/* ACKピンの状態を確認する */
/* 引数:なし */
/* 返値:ACKピンの状態 */
/******************************************************/
unsigned char rc_ack(void)
{
ITU1.TCNT = 0;
while(1)
{
if((P6.DR.BYTE & 0x40) != 0) return(1); /*ACK 受信*/
if(ITU1.TCNT > 400) return(0); /*タイムアウト*/
}
}
/******************************************************/
/* シリアルに送受するするデータを1バイトにまとめる */
/*レベル変換IC、74vhct540はインバータなので全データをインバート */
/* 引数:out_data CMDデータ */
/* in_data SWデータ */
/* 返値:なし */
/******************************************************/
void rc_io(unsigned char out_data, unsigned char *in_data)
{
unsigned char i, j, mask;
mask = 1;
*in_data = 0;
for(i = 0; i < 8; i++)
{
/*CMD bit*/
if( (mask & out_data) == 0) P5.DR.BYTE = P5.DR.BYTE | 0x01;
else P5.DR.BYTE = P5.DR.BYTE & 0xfe;
/*Clock ↓*/
P5.DR.BYTE = P5.DR.BYTE | 0x04;
/*wait*/
for(j = 0; j < 6; j++);
/*Clock ↑*/
P5.DR.BYTE = P5.DR.BYTE & 0xfb;
/*wait*/
for(j = 0; j < 6; j++);
/*Check DAT*/
if((P5.DR.BYTE & 0x08) == 0) *in_data = *in_data + mask;
mask = mask * 2;
}
return;
}
/*サーボ番号をピン番号に割り当てる*/
void srvWari(int srvNo, int x)
{
switch(srvNo){
case 0: P3.DR.BIT.B0 = x;break;
case 1: P3.DR.BIT.B1 = x;break;
case 2: P3.DR.BIT.B2 = x;break;
case 3: P3.DR.BIT.B3 = x;break;
case 4: P3.DR.BIT.B4 = x;break;
case 5: P3.DR.BIT.B5 = x;break;
case 6: P3.DR.BIT.B6 = x;break;
case 7: P3.DR.BIT.B7 = x;break;
case 8: P1.DR.BIT.B0 = x;break;
case 9: P1.DR.BIT.B1 = x;break;
case 10:P1.DR.BIT.B2 = x;break;
case 11:P1.DR.BIT.B3 = x;break;
case 12:P1.DR.BIT.B4 = x;break;
case 13:P1.DR.BIT.B5 = x;break;
case 14:P1.DR.BIT.B6 = x;break;
case 15:P1.DR.BIT.B7 = x;break;
case 16:P2.DR.BIT.B0 = x;break;
case 17:P2.DR.BIT.B1 = x;break;
case 18:P2.DR.BIT.B2 = x;break;
case 19:P2.DR.BIT.B3 = x;break;
case 20:P2.DR.BIT.B4 = x;break;
}
}
/*右スティックによるLED点灯*/
int DomainInSmall(int d,int k3,int x,int y)
{
int r2,x1,y1;
x1 = x-128; y1 = y-128;
r2 = x1*x1 + y1*y1;
if( r2 < d*d ) return -1;
if(y1<-k3) {
if(x1<-k3) return 11;
else if(x1<0) return 9;
else if(x1< k3) return 8;
else return 10;
}
else if(y1<0) {
if(x1<0) return 2;
else return 6;
}
else if(y1< k3) {
if(x1<0) return 3;
else return 4;
}
else {
if(x1<0) return 20;
else return 18;
}
}
/*左スティックによるLED点灯*/
int DomainInBig(int d,int k1,int k2,int x,int y)
{
int r2,x1,y1;
x1 = x-128; y1 = y-128;
r2 = x1*x1 + y1*y1;
if( r2 < d*d ) return -1;
if(y1<-2*k2) {
if(x1<-k1) return 15;
else if(x1< k1) return 17;
else return 19;
}
else if(y1<-k2) {
if(x1<-64) return 13;
else if(x1<0) return 9;
else if(x1<64) return 8;
else return 12;
}
else if(y1<0) {
if(x1<0) return 11;
else return 10;
}
else if(y1< k2){
if(x1<0) return 2;
else return 6;
}
else if(y1<2*k2){
if(x1<-80) return 0;
else if(x1<-40) return 3;
else if(x1<0) return 20;
else if(x1<40) return 18;
else if(x1<80) return 4;
else return 7;
}
else {
if(x1<-64) return 1;
else if(x1<0) return 14;
else if(x1<64) return 16;
else return 5;
}
}
/*メイン関数*/
void main(void){
unsigned char num;
int ret1,ret2,domain,k1,k2,k3;
unsigned char cmdData[32],swData[32];
char s[20],s1[20];
int case_number,i,su3,su4,su5,su6,su7,su8;
domain = 30;k1=40;k2=40;k3=64;
P1.DDR = 0xff; /*PORT3を出力に設定*/
P3.DDR = 0xff; /*PORT3を出力に設定*/
P2.DDR = 0xff; /*PORT2を出力に設定*/
P5.DDR = 0x07; /*port5*/
itu0_wait_init(); /* 待機タイマーの初期化 */
lcd_init(); /* lcd液晶表示器の初期化 */
rc_select(0); /*コントローラ初期化*/
cmdData[0] = 0x01;cmdData[1] = 0x42;
for(i = 2; i < 32; i++) cmdData[i] = 0x00;
while(1){
for(i=0;i<=20;i++) swData[i]=0;
rc_read(cmdData,swData);/*リモコンコントローラ状態読み取り*/
for(i=0;i<=20;i++) srvWari(i, 0);/*LED全消灯*/
su3 = swData[3];su4 = swData[4];
su5 = (int)swData[5];su6 = (int)swData[6];/*右スティックのデータx,y*/
su7 = (int)swData[7];su8 = (int)swData[8];/*左スティックのデータx、y*/
/*ボタン状態デコード*************************/
case_number = 0;
if(su3 == 239 && su4 == 255) {case_number = 1;srvWari(2,1);}/* 十字前*/
if(su3 == 191 && su4 == 255) {case_number = 2;srvWari(1,1);}/* 十字後*/
if(su3 == 127 && su4 == 255) {case_number = 3;srvWari(0,1);}/* 十字左*/
if(su3 == 223 && su4 == 255) {case_number = 4;srvWari(3,1);}/* 十字右*/
if(su3 == 255 && su4 == 239) {case_number = 5;srvWari(6,1);}/*△*/
if(su3 == 255 && su4 == 127) {case_number = 6;srvWari(4,1);}/*□*/
if(su3 == 255 && su4 == 191) {case_number = 7;srvWari(5,1);}/*×*/
if(su3 == 255 && su4 == 223) {case_number = 8;srvWari(7,1);}/*○*/
if(su3 == 255 && su4 == 247) {case_number = 9;srvWari(10,1);}/* R1*/
if(su3 == 255 && su4 == 251) {case_number = 10;srvWari(11,1);}/* L1*/
if(su3 == 255 && su4 == 253) {case_number = 11;srvWari(12,1);}/* R2*/
if(su3 == 255 && su4 == 254) {case_number = 12;srvWari(13,1);}/* L2*/
if(su3 == 247 && su4 == 255) {case_number = 13;srvWari(8,1);}/*スタート*/
if(swData[1] == 115){/*アナログモード時*/
ret1 = DomainInSmall(domain,k3, su5, su6);/*右スティックによるLED点灯*/
srvWari(ret1,1);
ret2 = DomainInBig(domain,k1,k2, su7, su8);/*左スティックによるLED点灯*/
srvWari(ret2,1);
}
numToString(su3,s);
lcd_locate(0,0);/* カーソル位置の指定*/
lcd_print(s); /* 文字列の表示 */
numToString(su4,s);
lcd_locate(4,0);/* カーソル位置の指定*/
lcd_print(s); /* 文字列の表示 */
numToString(su5,s);
if(su5<100 && su5 >=10) strcat(s," ");
if(su5<10) strcat(s," ");
lcd_locate(8,1);/* カーソル位置の指定*/
lcd_print(s); /* 文字列の表示 */
numToString(su6,s);
if(su6<100 && su6 >=10) strcat(s," ");
if(su6<10) strcat(s," ");
lcd_locate(12,1);/* カーソル位置の指定*/
lcd_print(s); /* 文字列の表示 */
numToString(su7,s);
if(su7<100 && su7 >=10) strcat(s," ");
if(su7<10) strcat(s," ");
lcd_locate(0,1);/* カーソル位置の指定*/
lcd_print(s); /* 文字列の表示 */
numToString(su8,s);
if(su8<100 && su8 >=10) strcat(s," ");
if(su8<10) strcat(s," ");
lcd_locate(4,1 );/* カーソル位置の指定*/
lcd_print(s); /* 文字列の表示 */
}
}
|


 早速、吉野さんの著書に紹介されていたワイヤレスコントローラ「ロジクールのLPGC-60000」を
探しましたが2004年製造のものなのでどこにもありませんでした。
早速、吉野さんの著書に紹介されていたワイヤレスコントローラ「ロジクールのLPGC-60000」を
探しましたが2004年製造のものなのでどこにもありませんでした。
.jpg) マイコンは5V電源で、受信機コネクタは3V電源です。
マイコンは5V電源で、受信機コネクタは3V電源です。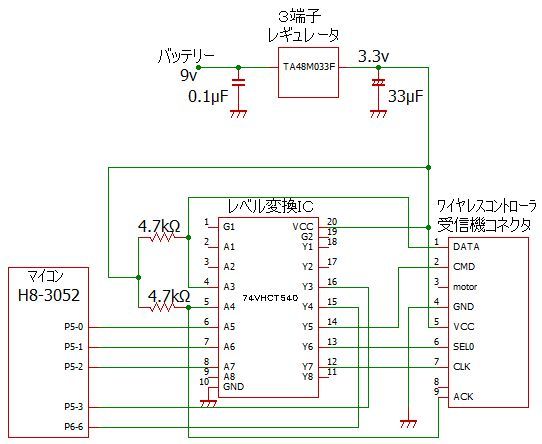
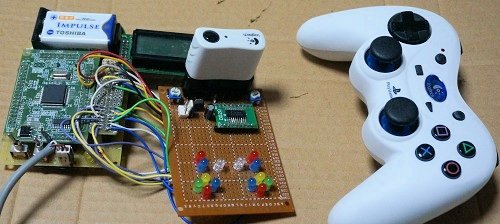
 アクリル板に固定して使いやすいようにしました。
アクリル板に固定して使いやすいようにしました。