.jpg)
.jpg) �@�O�q�����悤�ɁA�ŏ��͉��ɂ��m��Ȃ������Ƃ��́u�g�W�i�R�O�T�Q�j�͂ł�������I�v�Ǝv���܂����B
�@�O�q�����悤�ɁA�ŏ��͉��ɂ��m��Ȃ������Ƃ��́u�g�W�i�R�O�T�Q�j�͂ł�������I�v�Ǝv���܂����B�@�������A����킩���Ă���Ƃ��̂b�o�t�{�[�h�͖��h��̑傫���ŁA�h�n�{�[�h���w�K�p�̂��߂ɂł����̂��B
�u�h�n�{�[�h������������Ύg����B�v
�Ǝv���悤�ɂȂ�܂����B
�����ŁA��P�O�����l���قǂ�RS232C�R�l�N�^�̃p�^�[�����t���Ă��郆�j�o�[�T����Ղ��H���Ō����A ���̃{�[�h�ɂR�O�T�Q�̂b�o�t�{�[�h���ڂ��邱�Ƃɂ��܂����B
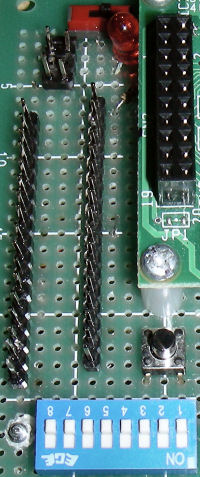
��������ďo���オ�����̂�����ŁA�E�オ���̗��ʂł��B
�Ȃ��R�O�T�Q�ɖ߂����̂��Ƃ����ƁA�����ɂ���悤�ɂR�O�T�Q�̃s�����͑S���łP�O�O����܂��B�g�W�^�C�j�[�̂R�U�U�S�̂ق��͂����������̔������炢�ł��B �s������������Α����قǍ��@�\�Ȃ̂ŁA��X�̂��Ƃ��l���ăs�����������ق��ł���R�O�T�Q�ɖ߂邱�Ƃ��l���܂����B
�@�R�O�T�Q�̋@�\�́A�P�U�r�b�g�}�C�R���ŁA�t���b�V���q�n�l�T�P�Q�j�a�A�r�q�`�l�W�j�a�A�p�������h/O�ő�V�W�{�AA/D�ϊ��P�O�r�b�g����\�WCH�A D/A�ϊ��W�r�b�g����\�QCH�A���@�\�^�C�}�[�TCH�A�V���A���|�[�g�Q�b�g�A�Q�TMH���N���b�N����ō����ɓ��삵�܂��B
�R�l�N�^�͂b�m�P����b�m�T�܂ł̑S���łT����܂��B
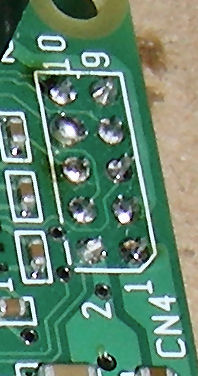
���̃R�l�N�^�̂����b�m�S�����s���w�b�_�[�A�s���\�P�b�g���ق��̃R�l�N�^�Ƃ͋t�����ɂ��Ă��܂��i�b�m�S�͂b�o�t�{�[�h�̉E��̈ʒu�j�B
�E�ɂ��̊g��}��\�����Ă��܂��B
�Ȃ��b�m�S�����t�����ɂ��Ă���̂��Ƃ����ƁA�b�m�S�ɂ͂R�O�T�Q�������߂̍ŏ����̒[�q�ł���A�o�n�v�d�q�A�f�m�c�A�q�d�r�A�T�u�A �v���O�����𗬂����߂̂q�r�Q�R�Q�b�[�q�A�u�[�g�i�������݁j���[�h�ݒ�[�q�ł���e�v�d�E�l�c�Q�����邩��ł��B
���̃��j�o�[�T����Ղ��h�n�{�[�h�Ƃ��āA�X�u���d�r�A��������d��������悤�ɗ��ʂŔz�������A���̃{�[�h��ɓd�����n�m�^�n�e�e���� ���߂̃X���C�h�X�C�b�`�A���̂��ɓd�����n�m���������������߂̂k�d�c�A���Z�b�g�̂��߂̃^�N�g�X�C�b�`�A �u�[�g�i�������݁j�p�̃f�B�b�v�X�C�b�`�p�̃s���w�b�_�[�A�T�u�d�����Ƃ邽�߂̃s���w�b�_�[�A�f�m�c�p�̃s���w�b�_�[�A�܂��������낢��ȋ@�\�� ����ł���悤�ɂW�[�q�̃f�B�b�v�X�C�b�`�����t���Ă��܂��B���ɂ��̕����̊g��}��\�����Ă��܂��B
.jpg)
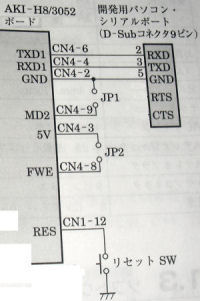 �E�ɂb�m�S�R�l�N�^����̂��̂��ǂ��z������̂��A�b�m�S����q�r�Q�R�Q�b�ɂǂ��Ȃ��̂��̃C���[�W�}�������܂��B
�E�ɂb�m�S�R�l�N�^����̂��̂��ǂ��z������̂��A�b�m�S����q�r�Q�R�Q�b�ɂǂ��Ȃ��̂��̃C���[�W�}�������܂��B�u�[�g�i�v���O�����̏������݁j���[�h�́A
�e�v�d���P�A�l�c�Q���O
�Ȃ̂ŁA�W�����p�[�s���ɂ���ĒZ�������邱�Ƃɂ���� �����Ȃ�悤�ɂ��܂��B�k�d�c�̍��̃s���w�b�_�[������ł��B