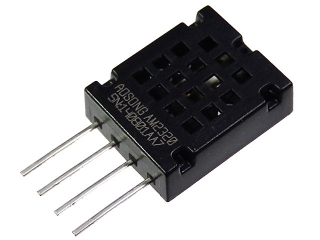
//温度湿度計(AM2320)の測定結果をLCDに表示
// Notes: 4MHz内部クロック
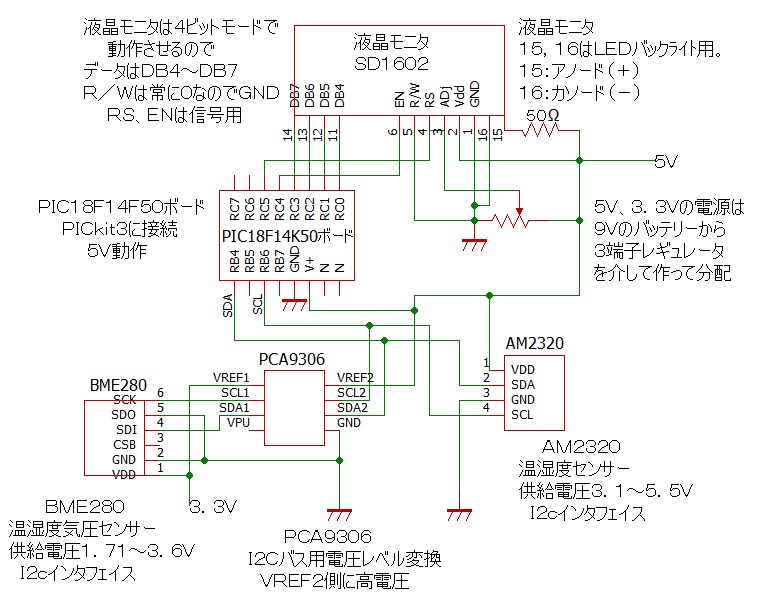
// PORTC(3) : LCD(DB7)14 PORTC(4) 6 : LCD_EN 6
// PORTC(2) : LCD(DB6)13 GND : LCD_RW 5
// PORTC(1) : LCD(DB5)12 PORTC(5) 5 : LCD_RS 4
// PORTC(0) : LCD(DB4)11 CONTRAST ADJ: LCD_Vo 3
// +5v : LCD(Vdd) 2
// GND : LCD(Vss) 1
// Target: PIC18F14K50
#include
#include
#define _XTAL_FREQ 4000000
#define LCD LATC
#define LCD_E LATCbits.LATC4
#define LCD_RS LATCbits.LATC5
#define CTRL 0
#define MOJI 1
#define I2cAck() SSPCON2bits.ACKDT=0;SSPCON2bits.ACKEN=1;while(SSPCON2bits.ACKEN)
#define I2cNAck() SSPCON2bits.ACKDT=1;SSPCON2bits.ACKEN=1;while(SSPCON2bits.ACKEN)
#pragma config FOSC = IRC // 内部クロック
#pragma config USBDIV = OFF, CPUDIV = NOCLKDIV
#pragma config IESO = OFF, FCMEN = OFF, PLLEN = ON
#pragma config BORV = 30, BOREN = OFF, PWRTEN = OFF
#pragma config WDTPS = 32768, WDTEN = OFF
#pragma config MCLRE = OFF, HFOFST = OFF, XINST = OFF
#pragma config BBSIZ = OFF, LVP = OFF, STVREN = ON
#pragma config CP1 = OFF, CP0 = OFF, CPD = OFF, CPB = OFF
#pragma config WRT1 = OFF, WRT0 = OFF, WRTB = OFF, WRTC = OFF
#pragma config EBTR1 = OFF, EBTR0 = OFF, EBTRB = OFF
void lcdOut(unsigned char cha,int mode,int bitMode)
{
unsigned char buf=0x00;
if(bitMode == 8){
LCD_E=0;
LCD=cha;
LCD_RS=0;
LCD_E=1;
__delay_us(20);
LCD_E=0;
}
else{
buf=(cha>>4);
LCD=buf;
if( mode == MOJI ) LCD_RS=1;
LCD_E=1;
__delay_us(20);
LCD_E=0;
if( mode == MOJI) LCD_RS=0;
__delay_us(20);//上位4bitと下位4bitの間
buf=cha;
LCD=buf;
if( mode == MOJI ) LCD_RS=1;
LCD_E=1;
__delay_us(20);
LCD_E=0;
if( mode == MOJI ) LCD_RS=0;
__delay_us(20);
}
}
void lcdInit(void)
{
__delay_ms(20);
lcdOut(0x03,0,8);
__delay_ms(4);
lcdOut(0x03,0,8);
__delay_ms(4);
lcdOut(0x03,0,8);//8bit mode
__delay_ms(4);
lcdOut(0x02,0,8);//4bit mode
__delay_ms(4);
lcdOut(0x08,CTRL,4);//2行表示モード
__delay_ms(4);
lcdOut(0x0c,CTRL,4);//表示設定
__delay_ms(4);
lcdOut(0x06,CTRL,4);//entry mode
__delay_ms(4);
lcdOut(0x01,CTRL,4);//cler
__delay_ms(20);
}
void lcdPos(int x, int y)
{
if( y == 1) lcdOut(0x80+x,CTRL,4);
else lcdOut(0xC0+x,CTRL,4);
}
void lcdDsp(unsigned char *str,int x, int y)
{
unsigned char *ad=0;
LCD_RS=0;
lcdPos(x,y);
__delay_ms(2);
ad=str;
while(*ad)
{
lcdOut(*ad,MOJI,4);
ad++;
}
}
char *numToString(int su,char *s)
{
int i,k,ret,num,num1,num2,len;
char s1[25];
for(i=1;i<=20;i++) s1[i-1] = 0x20;
s1[20]=0;
k=1;
num = su;
while(1){
num1 = num % 10 +'0';
s1[20-k]=num1;
num1 = num /10;
num = num1;
if(num1<1) break;
k++;
}
strcpy(s,s1+20-k);
return (s);
}
void I2cStart( void )
{
SSPCON2bits.SEN = 1; // initiate bus start condition
while(SSPCON2bits.SEN); // Start condition 確認
}void I2cStop( void )
{
SSPCON2bits.PEN = 1; // initiate bus stop condition
while(SSPCON2bits.PEN); // Stop condition 確認
}
signed char I2cWrite( unsigned char data ){
SSPBUF = data; // データセット
PIR1bits.SSPIF = 0; // 終了フラグクリア
while(!PIR1bits.SSPIF); // 送信終了待ち
return SSPCON2bits.ACKSTAT; // ACKなら「0」で復帰
}
unsigned char I2cRead( void )
{
SSPCON2bits.RCEN = 1; // データ受信を指示
while ( !SSPSTATbits.BF ); // 8ビット受信の完了を待つ
return SSPBUF; // 受信データで復帰
}
char *StrToShosu(char *namaStr,char *ShosuStr)
{
char tmpStr[30];
int len;
strcpy(tmpStr,namaStr);
len = strlen(namaStr);
*(tmpStr+len-1) = 0;
strcat(tmpStr,".");
strcat(tmpStr,namaStr+len-1);
strcpy(ShosuStr,tmpStr);
return ShosuStr;
}
void main(void){
int i,temp,humi;
unsigned char retData[10],s1[20],ss[10],sss[30],ret2;
signed char ret1;
OSCCON = 0b01010010; // 内部クロック4Mhz
LATC = 0; // PortCのすべてのビットを「0」
TRISC = 0b00000000; // ポートを出力に設定
TRISB = 0b11111111; // Bポートを入力に設定
ANSEL = 0b00000000; //すべてデジタル
ANSELH = 0b00000000;
// SSP1設定 -----------------------------------------------
SSPCON1 = 0b00001000; // I2C Master modeにする
SSPCON2 = 0x00; // PowerOn初期値にする
SSPSTAT = 0b10000000; // スルーレート制御はOff @100k
SSPADD = 9; // クロックの設定 100k@4MHz
SSPCON1bits.SSPEN = 1; // SSP 有効にする
lcdInit();
while(1){
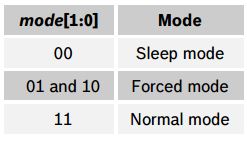
//Wake Sensor
I2cStart();
I2cWrite(0xB8); //slave address
__delay_us(800);
I2cStop();
I2cStart(); //STEP2
I2cWrite(0xB8); //slave address+W(0)
I2cWrite(0x03);
I2cWrite(0x00);
I2cWrite(0x04);
I2cStop();
//Return Data
__delay_us(1500);
I2cStart(); // STEP3
I2cWrite(0xB9); //slave address+R(1)
__delay_us(30);
for(i=1;i<=7;i++){
retData[i-1] = I2cRead();
I2cAck();
}
retData[7] = I2cRead();
I2cNAck();
I2cStop();
temp = retData[2]*256+retData[3];
humi = retData[4]*256+retData[5];
numToString(temp,ss);//「tempera=〇deg」を作り表示
StrToShosu(ss,s1);
strcpy(sss,"tempera =");
strcat(sss,s1);
strcat(sss,"deg");
lcdDsp(sss,0,1);
numToString(humi,ss);//[humidity=〇%]を作り表示
StrToShosu(ss,s1);
strcpy(sss,"humidity=");
strcat(sss,s1);
strcat(sss,"%");
lcdDsp(sss,0,2);
for(i=1;i<=50;i++) __delay_ms(100);//5秒待つ
}
}
|

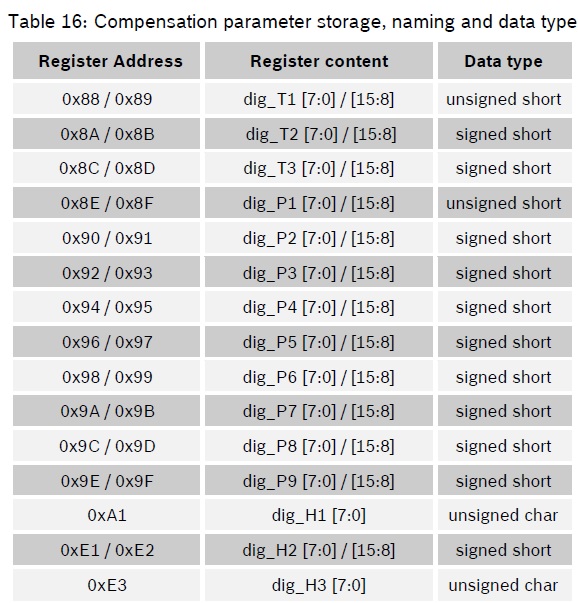
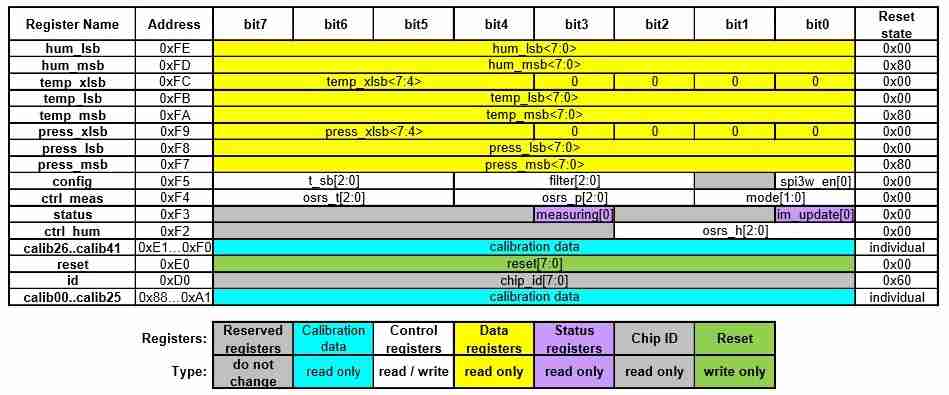 BME280のMemoryMapです。
BME280のMemoryMapです。