�@�����ł��b�����邱�Ƃ�rikiya����̂v�����T�C�g��ǂ�Ŋw�K���āA�l�Ȃ�ɃA�����W���Ă�������̂ł��B
rikiya����̂v�����T�C�g�̃A�h���X�́��@http://homepage1.nifty.com/rikiya/index.htm
rikiya����̂��̂͂g�W�i�R�O�S�W�j�ɂ��ď����Ă����܂��B
�@�g�W�i�R�O�T�Q�j�͂R�O�S�W�Ƃ͓����R���p�`�ŃN���b�N�����P�U���Q�T�l�g���A�q�n�l�e�ʂ�
�P�Q�W���T�P�Q�j�a�A�q�`�l�e�ʂ��S���W�j�a�Ƃ��Ȃ�p���[�A�b�v���Ă��܂����A�ꕔ�̎蒼���œ����悤�ɓ����܂��B
�@���̈ꕔ�̎蒼���Ƃ����̂́A�b�o�t���P�U����Q�T�l�g���ƂȂ������߂Ƀ^�C�}�[�̐ݒ肵�������炢���낤�Ǝv���Ă��܂������E�E�E�B
�@�����ɂ͈ꉞ�̐����������܂����A���ڂ�����rikiya����̂v�����T�C�g�������ɂȂ��Ă��������B
rikiya����ɂ͂��̏����Ă����\���グ�܂��B
|
| ���ؗp�̉�H |
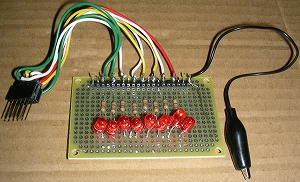
 ���ؗp�̉�H�����܂����B
���ؗp�̉�H�����܂����B
��������ł��B�k�d�c���W�_���ł���悤�ɂ������̂ł��B
�ȕւɎ��t������悤�ɃR�l�N�^�����Ăb�o�t�{�[�h�ɑ}����悤�ɂ��Ă��܂��B
�k�d�c�}�C�i�X���͂܂Ƃ߂Ĉ�{�̐��̐���N���b�v���ɂ��Ăb�o�t�{�[�h�̃O���E���h�[�q�ɂȂ��܂��B
������b�o�t�{�[�h�Ɏ��t�������̂��E�̂��̂ł��B
�������ؗp�̃v���O�����ł��B���̃v���O�����ɂ���ă|�[�g�P�ɂȂ����k�d�c�����ׂē_������ΐ���I
|
/*�|�[�g1���o�͂ɐݒ肵�A�|�[�g�P�̂W�s�����ׂĂn�m�ŏo�͂���Bled0.c*/
#include <3048f.h> /*I/O�A�N�Z�X�p�C���N���[�h*/
main() {
�@�@P1.DDR = 0xff; //�|�[�g�P���o�͗p�ɐݒ�
�@�@while(1)�@{
�@�@�@P1.DR.BYTE = 0xff; //�|�[�g�P���ׂẴr�b�g���P�ɂ���
�@�@}
}
|
�@�g�W�^�C�j�[�ŗ������ďo�������Ƃ��g�W�i�R�O�T�Q�j�ł��̂܂蒼���Ȃ��ŏo����Ƃ͌���܂���B
�@��{�I�ɂ͓������z�Ȃ̂ł������ۂɂ́u�g����|�[�g�͉����I�v�Ƃ��A�܂��C���N���[�h�t�@�C���������قȂ��Ă��邽�߂�
�u���܂ł̂b����v���O�����̋L�q�����̂܂ܓ������H�v�Ƃ��A�P���猩�������s���Ȃ���Ȃ�܂���B
�@���炩�ȈႢ�́A�u�s���̐����P�O�O�{�Ƃ������I�ɑ����Ă��܂��v�A�u�b�o�t�̃N���b�N�����قȂ��Ă��܂��v�B
�@�܂��A�b����v���O�������R���p�C���������̂��q�r�Q�R�Q�b�P�[�u����ʂ��Ăb�o�t�ɑ���̂ł����A���̑���c�[�����g�W�^�C�j�[�i�R�U�U�S�j�ł�
�c�n�r�v�����v�g����u�g���������v���g���ăR���p�C����̂`�a�r�t�@�C���𑗂�̂ɑ��āA�g�W�i�R�O�T�Q�j�ł́uH8WriteTurbo�v�Ƃ���
�f�t�h�c�[�����g���Ă`�a�r�t�@�C��������ɕϊ������l�n�s�t�@�C���𑗂�܂��B
|
| �R���p�C����Ƃ̌����� |
�@���̋@��ɂb����v���O�������R���p�C�����邽�߂̃o�b�`�t�@�C��������č�Ƃ��ȗ������悤�ƍl���܂����B
�@���͂��܂܂Ŏ��Ԃ��Ȃ����߂Ɂu�Ƃ肠�����o�����炢�����I�v�Ǝv���Ă���Ă��܂������A�b�̃\�[�X�t�@�C�����C���N���[�h�t�@�C�����r�t�a�t�@�C�����A
�R���p�C�����邽�тɐ��������n�a�i�E�l�`�o�E�`�a�r�E�l�n�s�t�@�C�����ЂƂ̃t�H���_�ɂ����ς��o���ĊǗ�����Ȃ���ԂɂȂ�܂����B
�@�����Ŏ~�ނ����ʂ��̕����悤�ɂЂƂ̃\�[�X�t�@�C�����ƂɂЂƂ̃t�H���_�ɂ܂Ƃ߂Ă��̃t�H���_���ɂ��̊֘A�̃t�@�C��������悤�ɂ��܂����B
�@���̂��łɃo�b�`�t�@�C��������Ă��̍�Ƃ��ȗ������悤�Ǝv��������ł��B
�@  �@�܂����̃o�b�`�t�@�C���삳���邽�߂̏����ł��B
�@�܂����̃o�b�`�t�@�C���삳���邽�߂̏����ł��B
�@��̌��v���O�����iLED0�j���ɋ����Đ������܂��B
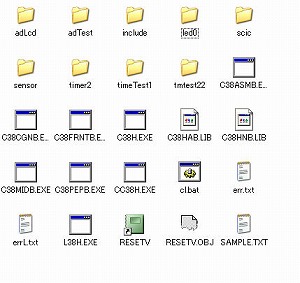
�����R���p�C���p�̃v���O�����������Ă���t�H���_�ł��B
�\�[�X�t�@�C���Ƃr�t�a�t�@�C���������Ă���\�[�X�t�@�C���Ɠ������O�̃t�H���_������������܂��B
 �C���N���[�h�t�@�C�����uinclude�v�Ƃ����t�H���_�ɂ��ׂē���Ă���܂��B
�C���N���[�h�t�@�C�����uinclude�v�Ƃ����t�H���_�ɂ��ׂē���Ă���܂��B
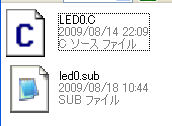
�E�オ�u�k�d�c�O�v�̃t�H���_�ŃR���p�C���O�̏�Ԃł��B
�����ŃR���p�C���p�̃o�b�`�t�@�C���ucl.bat�v���c�n�r�v�����v�g���瓮�����܂��B
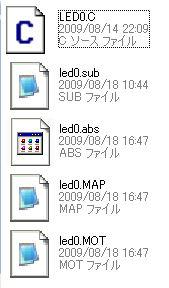
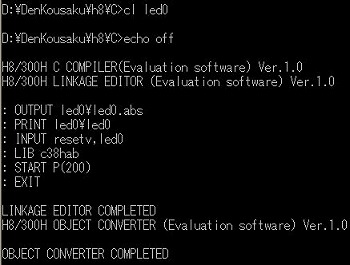 �E���t�H���_�u�k�d�c�O�v�̒��̏�Ԃł��Bcl.bat�̓���O�Ɣ�ׂĂ`�a�r�E�l�`�o�E�l�n�s�̂R�̃t�@�C���������Ă��܂��B
�E���t�H���_�u�k�d�c�O�v�̒��̏�Ԃł��Bcl.bat�̓���O�Ɣ�ׂĂ`�a�r�E�l�`�o�E�l�n�s�̂R�̃t�@�C���������Ă��܂��B
��ԉ��̂l�n�s�t�@�C�����K�v�ȃt�@�C���ł��̃t�@�C�����R�O�T�Q�̂b�o�t���ɑ���܂��B
����ł͂��̂��߂́ucl.bat�v�Ɓuled0.sub�v�̃t�@�C���̒��������Ă����܂��B
�܂��ucl.bat�v�ł��B
�������̂͂c�n�r�v�����v�g����ucl�@led0�v�Ɠ��͂��܂��B
���̂����̂��Ƃɓ��͂����uled0�v���u���P�v�ɒu��������ē��삵�܂��B
�u�������čl����ƁA�uLED0��led0.c�v�uled0\led0.sub�v�ƂȂ肱�̃t�H���_���̃t�@�C�����g���Ă��邱�Ƃ��킩��܂��B
�uc38h led0\led0.abs�v�ɂ���Ă`�a�r�t�@�C�����ϊ����ꂽ�l�n�s�t�@�C���̏o�͐悪���̃t�H���_���ɂȂ�܂��B
�R���p�C�����̒��ԃt�@�C���Ƃ��Ă������t�@�C�����J�����g�t�H���_�ɍ���܂����A����͂��Ƃł͕s�v�Ȃ̂Łudel�@led0.obj�v�ɂ��Ō�ɍ폜���܂��B
|
echo off
d:
cd D:\denkousaku\h8\c
del err.txt
cc38h.exe -CPU=300HA -INCLUDE=d:\denkousaku\h8\c\include %1\%1.c >>err.txt
type err.txt
del errL.txt
l38h.exe -SUBCOMMAND=%1\%1.sub >> errL.txt
type errL.txt
c38h %1\%1.abs
del %1.obj
|
����lid0.sub�ł��B
�uOUTPUT led0\led0.bas�v�ɂ��`�a�r�t�@�C���̏o�͏ꏊ��led0�t�H���_�ɐݒ肵�܂��B
�uPRINT led0\led0�v�ɂ�Ăl�`�o�t�@�C���̏o�͏ꏊ�����̃t�H���_�ɐݒ肵�܂��B
|
OUTPUT led0\led0.abs
PRINT led0\led0
INPUT resetv,led0
LIB c38hab
START P(200)
EXI
|
�^�C�}�[�̎g���� |
�@�܂��^�C�}�[�������܂����B
�@�u�Ȃ��^�C�}�[���n�߂ɁI�v�ƌ����̂́A���A���^�C���ʼn������悤�Ǝv���Ɖ��~���b�����ƂɊĎ����Ȃ��炻�̏�Ԃ����Ăǂ����邱������Ƃ����̂�
���߂�K�v������܂��B���̂��߂ɂ܂��^�C�}�[�@�\�ł��B
�@���̂b�o�t�ɂ́A�h�s�t�i�P�U�r�b�g�C���e�O���[�e�B�b�h�^�C�}�[)���T�������Ă��܂��B
�@�^�C�}�[������X�^�[�g������ƁA�P�U�r�b�g�̃^�C�}�[�J�E���^���J�E���g���J�n���܂��B�f�q�`�i�[�l�������W�X�^�`�j�ɒl��ݒ肵�Ă����ƃJ�E���g�l��
�f�q�`�ƈ�v�����Ƃ��ɂs�r�q�i�^�C�}�[�X�e�[�^�X���W�X�^�j�h�e�l�`�Ƃ����a�h�s���P�ƂȂ�܂��B���̂h�e�l�`�ׂ邱�Ƃɂ���Đݒ肵���^�C�}�[�l��
�Ȃ������ǂ������킩��܂��B
���̂��߂̃v���O�����̊T�v�ł��B
���������@timerInit()�@�����B
�i�P�j�s�b�q�i�^�C�}�[�R���g���[�����W�X�^�j�̐ݒ�
| �V |
�U |
�T |
�S |
�R |
�Q |
�P |
�O |
| �|�|�|�| |
�b�b�k�q�P |
�b�b�k�q�O |
�b�j�d�f�P |
�b�j�d�f�O |
�s�o�r�b�Q |
�s�o�r�b�P |
�s�o�r�b�O |
�s�o�r�b�Q�C�P�C�O�ł͂s�b�m�s�̊�ƂȂ�N���b�N��I�т܂��B�O�P�P�ɐݒ肷��Ɠ����N���b�N�Q�T�l�g���̂P�^�W�ɂł��܂��B
�b�j�d�f�P�C�O�͂O�O�ɁA�b�b�q�P�C�O�ł͂s�b�m�s�i�^�C�}�[�J�E���^�j�̃N���A�̎d����ݒ肵�܂��i������J�E���^�N���A�v���Ƃ����܂��j�B
�f�q�`�̒l�ŃN���A�������ł��̂ŁA���̏ꍇ�͂O�P�ɂ��܂��B����Ƃs�b�q���ׂĂ̐ݒ�͂����Ȃ�܂��B
| �|�|�|�| |
�b�b�k�q�P |
�b�b�k�q�O |
�b�j�d�f�P |
�b�j�d�f�O |
�s�o�r�b�Q |
�s�o�r�b�P |
�s�o�r�b�O |
| �O |
�O |
�P |
�O |
�O |
�O |
�P |
�P |
������P�U�i���ɂ���ƂQ�R���ł��B�@�@������ ITU0. TCR. BYTE = 0X23;�@�ƂȂ�܂��B
�i�Q�j�f�q�`�i�[�l�������W�X�^�`�j�̐ݒ�
�@�s�b�q�̐ݒ�ɂ��s�b�m�s�̊�N���b�N�͂Q�T�^�W�l�g���ɂȂ�܂��B
�@���̎����͂P�����Q�T�^�W�l�g�����W�^�Q�T�ʂ��ł��B�@��������{������P�����ɂȂ邩���l���܂��B
�@�P�������W�^�Q�T�ʂ����Q�T�^�W�~�P�O�O�O���R�P�Q�T�@�ł��̂łR�P�Q�T�{����Ƃ��傤�ǂP�����ɂȂ�܂��B
������f�q�`���R�P�Q�T�ɐݒ肷��Ƃ��傤�ǂP������ɂh�e�l�`���P�ƂȂ��ĂP�����o�߂������Ƃ�m�点�Ă���܂��B
�R�P�Q�T���P�U�i���ɒ����ƂO���R�T���ł��̂ŁA�@�@ITUO.GRA = 0x0c35;�@�@�Ɛݒ肵�܂��B
|
�@����Ə������������������h�������i�j�͎��̂悤�ɂȂ�܂��B
void timerInit(void)
�o
�@�@�@ITU0.TCR.BYTE = 0X23; //�^�C�}�[�R���g���[�����W�X�^�̐ݒ�
�@�@�@ITU0.GRA = 0X0C35; //�f�q�`���R�P�Q�T�ɂ��ĂP�������P�P�ʂɂ���
�@�@�@ITU0.TSTR.BIT.STR0 = 0; //�^�C�}�[�J�E���g��~
}
|
�҂����Ԃ̊��@wait(int waitTime)�@�����
�@�^�C�}�[�R���g���[�����W�X�^�̐ݒ�ɂ���ă^�C�}�[�̒P�ʂ̓~���b�ƂȂ�܂����̂ŁA�Ⴆ�T�O�O�����҂��̏ꍇ�ɂ́@wait(500)�@
�Ƃ���悤�Ȏg����������������܂��B
�@�P�����ɂȂ�h�e�l�`�̒l���P�ɂȂ�悤�ɐݒ肵�Ă���܂��B�����łh�e�l�`�̒l���O�̊Ԃ͂P�����o�߂��Ă��Ȃ��Ƃ������ƂȂ̂�
�u���̊ԉ������Ȃ��ő҂v�Ƃ������Ƃ��L�[�ɂȂ�܂��B
�@���̂��߂̂��̂́@�u�@while(ITU0.TSR.BIT.IFMA == 0){}�@�v�@�ł��B
�@����ɂ���ĂP�����ȓ��͂����ƃR�R�ő҂������܂��B�P�����ɂȂ�Ƃh�e�l�`���P�ƂȂ�܂��̂ōēx�h�e�l�`���O�ɂ��܂��B�����ݒ�
�����@waitTime�@�̊ԌJ��Ԃ��܂��B
|
void wait(int waitTime)
{
�@�@int i;
�@�@ITU0.TSTR.BIT.STR0 = 1;//�^�C���J�E���g�J�n
�@�@for ( i=0 ; i < waitTime; i++) {
�@�@�@while(ITU0.TSR.BIT.IFMA == 0) {}//�P�����ɂȂ�܂ł����ő҂�
�@�@�@ITU0.TSR.BIT.IFMA = 0;//�P�����o�߂����炱�̒l���P�ɂȂ��Ă���̂ł��̒l���O�ɖ߂��čēx�P�����̌��m�J�n
�@�@}
�@�@ITU0.TSTR.BIT.STR0 = 0;//�^�C���J�E���g�I��
}
|
timerInit()�@�Await( )�@���g����C�����@main()�@�����
�@�쐬�����@timerInit�@�Ɓ@wait�i�j�@�ɂ���Ă����������͎��̂悤�ɂȂ�܂��B
�@���̂悤�ɂ���Ɓu�`�̏����v�����Ă���T�O�O�����o�ߌ�Ɂu�a�̏����v������Ƃ������ƂɂȂ�܂��B
|
void main()
{
�@�@timerInit();//�^�C�}�[�R���g���[�����W�X�^�̏�����
�@�@A�̏���
�@�@wait(500)//�T�O�O�����҂�
�@�@B�̏���
�p
|
|
��قǂ̌��ؗp��H���g���āA���̃^�C�}�[�łP�b���ƂɂW�̂k�d�c�����Ԃɓ_�����Ă��������܂��B�������̂��߂̃v���O�����ł��B
|
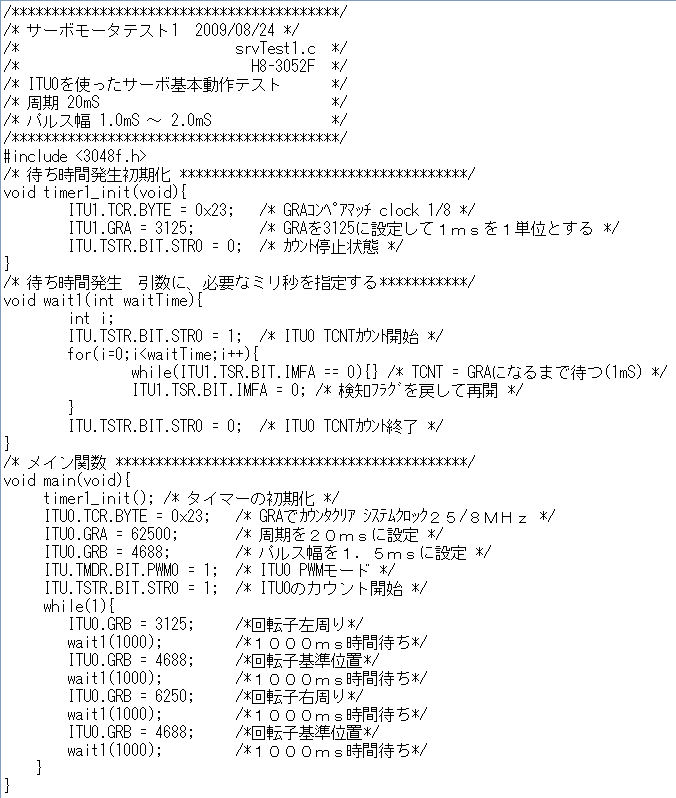
/****************************************/
/* �^�C�}�[�e�X�g 2009/08/14 */
/* timtest1.c */
/* H8-3052 */
/* �|�[�g�P�̂k�d�c�����Ԃɓ_���@�@�@�@ */
/****************************************/
#include <3048f.h>
/* �҂����Ԕ��������� ************************************/
void timer_init(void){
ITU0.TCR.BYTE = 0x23; /* GRA���߱ϯ� clock 1/8 */
ITU0.GRA = 0x0c35; /* GRA���R�P�Q�T�ɐݒ肵�ĂP�������P�P�ʂɂ��� */
ITU.TSTR.BIT.STR0 = 0; /* ���Ē�~��� */
}
/* �҂����Ԕ����@�����ɁA�K�v�ȃ~���b���w�肷��***********/
void wait(int waitTime){
int i;
ITU.TSTR.BIT.STR0 = 1; /* ITU0 TCNT���ĊJ�n */
for(i=0;i
while(ITU0.TSR.BIT.IMFA == 0){} /* TCNT = GRA�ɂȂ�܂ő҂�(1mS) */
ITU0.TSR.BIT.IMFA = 0; /* ���m�ނ�߂��čĊJ */
}
ITU.TSTR.BIT.STR0 = 0; /* ITU0 TCNT���ďI�� */
}
/* ���C���� ********************************************/
//* Port1��LED�����Ԃɓ_�������� */
void main(void){
unsigned char data[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
int i;
timer_init(); /* timer�̏����� */
P1.DDR = 0xff; /* port1�o�͂ɐݒ� �\��LED */
i = 0;
while(1) {
P1.DR.BYTE = data[i];
wait(1000); /* 1000mS�҂� */
i++;
if( i>7 ) i=0;
}
}
|
�`�c�ϊ��̎g���� |
�`�c�ϊ��@�\�̏����ݒ�
�@�`�c�ϊ��̐ݒ�ɂ͂`�c�b�r�q�i�`�c�R���g���[���X�e�[�^�X���W�X�^�j���g���܂��B
| �V |
�U |
�T |
�S |
�R |
�Q |
�P |
�O |
| �`�c�e |
�`�c�h�d |
�`�c�r�s |
�r�b�`�m |
�b�j�r |
�b�g�Q |
�b�g�P |
�b�g�O |
�`�c�e�iADEndFlag�j�F�`�c�ϊ����I�������Ƃ��ɂP�ɂȂ�܂��B
�`�c�h�d�iADInterruptEnable�j�F�`�c�ϊ��̏I���Ŋ��荞�݂������邩�ǂ����̐ݒ�ł��B
�`�c�r�s�iADStart�j�F�`�c�ϊ��̊J�n�E��~�̐ݒ�B�O�Œ�~�A�P�ŊJ�n�B
�r�b�`�m�iScanMode�j�F�`�c�ϊ�������Ƃ��ɕ����̃`�����l�����g�����ǂ����̐ݒ�B
�b�j�r�iClockSelect�j�F�`�c�ϊ����Ԃ̐ݒ�B�O�Œᑬ���[�h�A�P�ō������[�h�B
�b�g�Q�E�b�g�P�E�b�g�O�͒P�ꃂ�[�h�A�X�L�������[�h�̐ݒ�͈ȉ��̂悤�ł��B
| �b�g�Q |
�b�g�P |
�b�g�O |
�P�ꃂ�[�h |
�X�L�������[�h |
| �O |
�O |
�O |
�`�m�O |
�`�m�O |
| �O |
�P |
�`�m�P |
�`�m�O�C�P |
| �P |
�O |
�`�m�Q |
�`�m�O�C�P�C�Q |
| �P |
�P |
�`�m�R |
�`�m�O�C�P�C�Q�C�R�@ |
| �P |
�O |
�O |
�`�m�S |
�`�m�S |
| �O |
�P |
�`�m�T |
�`�m�S�C�T |
| �P |
�O |
�`�m�U |
�`�m�S�C�T�C�U |
| �P |
�P |
�`�m�V |
�`�m�S�C�T�C�U�C�V |
�R�O�S�W�̃w�b�_�[�t�@�C���u3048F.H�v�ł��ꂪ�ȒP�Ɉ�����悤�ɒ�`����Ă��܂��B
���̃��W�X�^���̂��b�r�q�Ƃ��Ē�`����Ă���A���W�X�^�S�̂͗Ⴆ�@AD.CSR.BYTE=0X33�A
���ꂼ��̃r�b�g�l�͗Ⴆ��
AD.CSR.BIT.ADF = 1;�@�@�@AD.CSR.BIT.ADIE = 0;�@�@AD.CSR.BIT.ADST = 1;AD.CSR.BIT.SCAN = 0;
�b�g�̒l�͂R�r�b�g�܂Ƃ߂ĂO����V�܂ł̐��l�Őݒ肵�܂��B�Ⴆ�X�L�������[�h�ł`�m�O�P�Q���g���ꍇ�́@AD.CSR.BIT.CH = 2;
�ƂȂ�܂��B
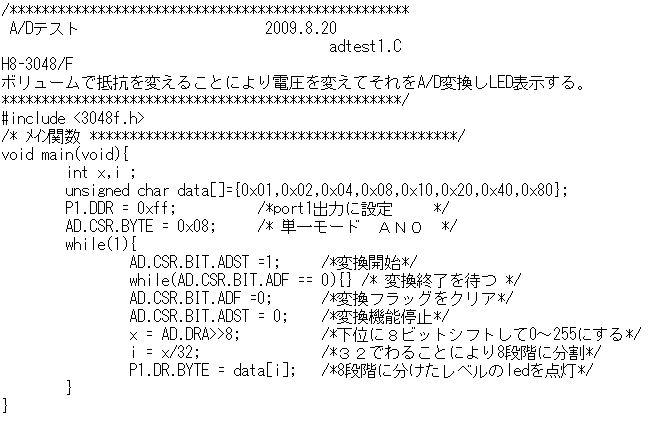
�`�c�ϊ����g���Č���
�`�c�ϊ��̌��̗��Ƃ��āu�{�����[�����܂킵�Ă����Ƃ���ɘA��ĂW�̂k�d�c�����Ԃɓ_�����Ă����v
  �Ƃ������Ƃ��l���Č��܂��傤�B
�Ƃ������Ƃ��l���Č��܂��傤�B
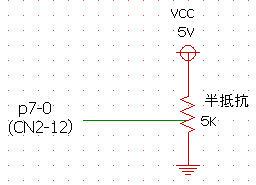
�@�`�c�ϊ��̂��߂̃s���̓|�[�g�V�̂O����V�r�b�g�ł��B���̃s���͂b�m�Q�̂P�Q����P�X�Ԗڂ̃s���ł��B
����͂ЂƂ̃{�����[���������g���̂ł��̏o�͂��|�[�g�V�̂O�r�b�g�ځi�b�m�Q�̂P�Q�s���j�ɂȂ��܂��B
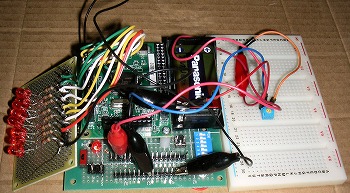
�@�E�����̂��߂̉�H�}�ŁA������������ۂɑg���̂ł��B���̂��߂����Ɏg���܂��̂ō���̓u���b�h�{�[�h�ɑg�݂܂����B
�O���E���h�͂b�o�t�{�[�h�̃O���E���h�R�l�N�^�ɂȂ��A�u�b�b�i�T�u�j�͂b�o�t�{�[�h�̂T�u�̃R�l�N�^�ɂȂ��܂��B
�������Ȃ��̂��T�j�̔���R�ł��B���̐^�Ɍ����Ă��鉩�F�̂Ƃ�����v���X�h���C�o�ʼnĂ����ƂO�j�`�T�j�܂�
��R�l��ω������邱�Ƃ��o���܂��B
�g�W�i�R�O�T�Q�j�̂`�c�ϊ��@�\�͂P�O�r�b�g�̐��x�������Ă��āA�O�`�T�u�̓d�����O�`�P�O�Q�R�̂P�O�Q�S�i�K��
���l�ɕϊ����邱�Ƃ��o���܂��B
�@���̕ϊ����ʂ͂P�U�r�b�g���W�X�^�̏�ʂP�O�r�b�g�Ɏ��߂��܂��B
| �P�T |
�P�S |
�P�R |
�P�Q |
�P�P |
�P�O |
�X |
�W |
�V |
�U |
�T |
�S |
�R |
�Q |
�P |
�O |
| �`�c�X |
�`�c�W |
�`�c�V |
�`�c�U |
�`�c�T |
�`�c�S |
�`�c�R |
�`�c�Q |
�`�c�P |
�`�c�O |
�|�|�| |
�|�|�| |
�|�|�| |
�|�|�| |
�|�|�| |
�|�|�| |
�@���ʂU�r�b�g�͎g���Ă��܂���̂ŁA���̂܂܂̂P�O�r�b�g�̐��x�Ŏ��o�����Ƃ���ƉE�����ɂU�r�b�g�V�t�g����
�K�v������܂��B
�@�����ł͂���قǂ̐��x�͕K�v����܂���̂łQ�T�U�i�K�̐��x�ɂ��Ď��o���܂��B�����ʼnE�����ɂW�r�b�g�V�t�g���܂��B
�@�v���O�����ł́@�`�c�D�c�q�`�����U�@�Ƃ������ɏ����܂��B�u�����v�͉E�����ɃV�t�g����Ƃ����Ӗ��ɂȂ�܂��B���̂c�q�`
�Ƃ͂`�c�ϊ��̌��ʂ����߂��Ă��郌�W�X�^�̖��O�ł��B
�@
�@���̂悤�ɂ��āA�v���O�����ōD�݂̐��x�ɂ��Ď��o�����Ƃ��o���܂��B
�@����R�̐^�̉��F���h���C�o�ʼn�]�����邱�Ƃɂ���Ē�R�l���O����T�j�܂ŕω����Ă����܂��B����ɂ���Ăo�V�|�O
�ɑ�����d���l���O�u�`�T�u�܂ŕω����܂��B�v���O�����ɂ���Ă��̓d���l���`�c�ϊ����ĂO�`�Q�T�T�̐��l�ɕϊ����܂��B
�@���̓d���l���R�Q�Ŋ��邱�Ƃɂ��W�i�K�̃��x���ɂ��Ă���ɂ���ĊY���̂k�d�c���_�����܂��B
�@�Ƃ������Ƃł��̂ŁA�h���C�o�ł܂킵�Ă����ɂ��������Ăk�d�c�����Ԃɓ_�����Ă����܂��B
�@�������̃v���O�����ł��B
�@AD.CSR.BYTE�@=�@0X08�@�͒P�ꃂ�[�h�A�����ϊ��̐ݒ�ł��B
|
|
�T�[�{���[�^�̈����� |
�@�c�b���[�^�[�ɂ��ẮA���[�^�h���C�o�h�b�i�s�`�V�Q�X�P�j���g���ăR���g���[�����邱�Ƃ𗝉���������ł��B���x�̓T�[�{���[�^�̃R���g���[���ɒ��킵�܂����B
�@�T�[�{���[�^�̓��{�b�g�̊߂̐���Ɏg���郂�[�^�ŁA���m�ɉ�]�p�x�̐��䂪�o���܂��B
�Q�����s���{�b�g���ŏI�ڕW�Ƃ��Ă���l�Ƃ��Ă͂Ȃ�Ƃ��Ă���������K�v������܂��B
�@�T�[�{���[�^�̃R���g���[���ɂ͂o�v�l�iPulse Width Modulatoin �p���X���ϒ��j�������g���܂��B���̂o�v�l�͂c�b���[�^�̃R���g���[���̂Ƃ��ɂ��g�����Ƃ��o���܂��B
�@�O�ɂc�b���[�^���g�������͓d�q�H��̏��S�҂̈���o�Ȃ����x���������ł����̂ŋɗ͊ȒP�ȕ��@�ō��܂����B�������T�[�{���[�^�̃R���g���[���͂o�v�l
�����o���܂���B����͍��������ď����ₒ��������������̐�����ǂ�ŗ������܂����B
�T�[�{���[�^�Ƃo�v�l(�p���X���ϒ��j
�@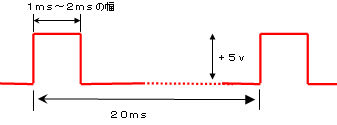 ������̎����ŕ������炩�̃p���X������Ƃ����d�C�M�����l���܂��B ������̎����ŕ������炩�̃p���X������Ƃ����d�C�M�����l���܂��B
�@�ȒP�Ɍ����A�����œd�����������ꂽ�肷��悤�Ȃ��Ƃł��B
�@
�@���̂悤�ȓd�C�M�����c�b���[�^�ɗ^���܂��ƁA�p���X���̕ω��ɂc�b���[�^�̉�]�q���t���Ă����Ȃ��Ȃ�A���̌��ʃp���X���Ɍ�������
�d�����c�b���[�^�ɉ�����ꂽ���ƂƓ����ɂȂ�܂��B
�@����ɂ���Ăc�b���[�^�ɉ�����d���̋������p���X���̑����ɂ���Đ��䂷�邱�Ƃ��ł��܂��B
�@���̂悤�Ƀp���X���ɂ���āA���[�^�𐧌䂷��������o�v�l�i�p���X���ϒ��j�����Ƃ����܂��B
�@�T�[�{���[�^�̏ꍇ�́A������d�C�M���͂��̂悤�Ȃo�v�l�̔g�`�̂��́A�ƌ��܂��Ă��܂��B
�@�܂��A������̎����ŕ��Ȃ�ڂ̃p���X��^����ƃT�[�{���[�^�̊p�x�����x�ɂȂ�A�ƌ��܂��Ă��܂��B
�@�u�Q�O�����̎����v�Łu�P�����`�Q�������̃p���X��^����ƃT�[�{���[�^�̉�]�q�p�x�͂O������P�W�O���v�ɂȂ�悤�ł��B
�o�v�l�ŃT�[�{���[�^����
�@�Q�O�����̎����łP�����A�P�D�T�����A�Q�����A�P�D�T�����A�P�����E�E�E�ƃp���X�����T�[�{���[�^�ɗ^�������܂��ƁA�T�[�{���[�^��
��]�q�͍��E�^�E�E�E�^�E���E�E�E�E�E�ƍ��E�̎�ӂ���J��Ԃ��܂��B
�@���̂��߂ɂǂ��������ɂ�����������l���Č����܂��B
�@�g�W�i�R�O�T�Q�j�ł́A�^�C�}�[�@�\�̂h�s�t�i�C���e�O���[�e�B�b�h�^�C�}�[���j�b�g�j�ɂo�v�l���g���@�\������܂��B
�@���傤�ǂT�`�����l�����̂h�s�t�O�`�S���g���āA�o�v�l�M�����s�h�n�b�`�O�i�o�`�Q�j�A�s�h�n�b�`�P�i�o�`�S�j
�s�h�n�b�`�Q�i�o�`�U�j�A�s�h�n�b�`�R�i�o�a�O�j�A�s�h�n�b�`�S�i�o�a�Q�j�̒[�q����o�͂ł��܂��B
�@����͒P�ɂP�`�����l���݂̂��g���܂��̂łs�h�n�b�`�O���g���܂��B�o�͒[�q�͂o�`�Q�ł��B�R�l�N�^�͂b�m�P�̂P�O�s���ڂƂȂ�܂��B
�@�o�v�l�ɂh�s�t�O���g���܂��B
�@�܂��o�v�l�Ƃ��Ďg���h�s�t�O�̐ݒ�����܂��B
�@�V�X�e���N���b�N�͂Q�T�l�g���ł��B�����N���b�N�͂P�^�W�̐ݒ�Ŏg���܂��̂Ŏ�����ݒ肷�邽�߂̃N���b�N�͂Q�T�^�W�l�g���ƂȂ�܂��B
�W�^�Q�T�ʂ����ƂɃJ�E���^���A�b�v���Ă����܂��B
�@�O�Ɠ����悤�ɃJ�E���^�N���A�v���i�f�q�`�̒l�Ɠ����Ȃ�^�C�}�[�J�E���^���N���A�j�Ƃ��Ăf�q�`�̒l���g���܂��B
�@���łɐ��������^�C�}�[�@�\�Ɠ����ݒ�ł��B
�@���̐ݒ�ɂ��f�q�`�̒l�ɂ����������܂�܂��B�܂��p���X���͂f�q�a�̒l�Őݒ肵�܂��B
�@�������Q�O�����ɂ��邽�߂̂f�q�`�̒l���Q�O�������W�^�Q�T�ʂ����U�Q�D�T�~�P�O�O�O���U�Q�T�O�O�ł��B
�@�p���X���Q�����̂��߂̂f�q�a�̒l����̒l�̂P�^�P�O���U�Q�T�O�ł��B
�@�p���X���P�����̂��߂̂f�q�a�̒l������ɂP�^�Q���R�P�Q�T�ł��B
�@�p���X���P�D�T�����̂��߂̂f�q�a���i�U�Q�T�O�{�R�P�Q�T�j�^�Q����S�U�W�W�ł��B
�@�^�C�}�[���o�v�l�Ƃ��Ďg�����߂̐ݒ�͂h�s�t�D�s�l�c�q�i�^�C�}�[���[�h���W�X�^�j�ōs���܂��B
�@���̃��W�X�^�͉��̂悤�ȂW�r�b�g���W�X�^�ŁA�T�`�����l�����̂o�v�l�̐ݒ�����܂��B
�@���͂h�s�t�O�̂o�v�l���n�m�ɂ���̂ŁA�h�s�t�D�s�l�c�q�D�a�h�s�D�o�v�l�O���P�@�Ƃ��܂��B�l�c�e�E�e�c�h�q��
����͎g�p���܂���B�@
| �V |
�U |
�T |
�S |
�R |
�Q |
�P |
�O |
| �|�|�| |
�l�c�e |
�e�c�h�q |
�o�v�l�S |
�o�v�l�R |
�o�v�l�Q |
�o�v�l�P |
�o�v�l�O |
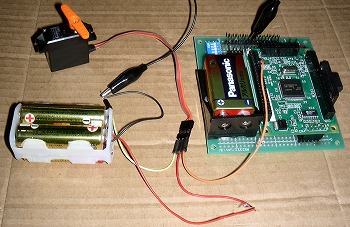  �T�[�{���[�^�͍��ł��B
�T�[�{���[�^�͍��ł��B
�[�q����R�{�̐����o�Ă��܂��B�^�̐Ԃɂ͂TV���Ȃ��܂����A�c�b���[�^�Ɠ����悤�ɓd���͊O���d�����g���܂��B
��ԍ����ۂ����̓O���E���h�A������{�͐M�����ł��B���̏ꍇ�͂o�`�Q�̃s���i�b�m�P�|�P�O�j�ɂȂ��܂��B
�E�����ۂɂȂ������̂ł��B
�X�C�b�`���n�m�ɂ���ƃT�[�{�̉�]�q�����E�̎�ӂ�����܂��B
�v���O���������Ɏ����܂��B
���Ă��炢�܂��Ƃ킩��悤�ɁA�h�s�t�O���o�v�l����Ɏg���Ă��܂��̂ŁA
���ԑ҂��̂��߂̃^�C�}�[�ɂ͂h�s�t�P���g���Ă��܂��B
timer1_Init(void) �A�Ƃ�wait1(int waitTime)�@�Ƃ����悤�ɂh�s�t�O���g�������ԑ҂��̊���
���O�Ƌ�ʂł���悤�ɂ��Ă��܂��B
�@���̃v���O�����͒������ł����Atimer1_init ��wait1�͎��ԑ҂��̂��߂ɂ��邾���Ȃ̂ŁA
main���݂̂����Ă��炤�Ƃ킩��₷���Ǝv���܂��B
|
|
final.jpg) �@���s���{�b�g�ɓ��ڂ���}�C�R�����������Ă��邤���ɂg�W�i�R�O�T�Q�j�̃}�U�[�̊����`�Ȃ���̂�
�����Ă��܂����B
�@���s���{�b�g�ɓ��ڂ���}�C�R�����������Ă��邤���ɂg�W�i�R�O�T�Q�j�̃}�U�[�̊����`�Ȃ���̂�
�����Ă��܂����B �@�����ŒʐM�P�[�u�������H���Ď��ۂɎg���R�s�������̃R�l�N�^�ɂ��Ă��̌��ʃ{�[�h�̕���
�R�s���̃R�l�N�^�ɂȂ�܂����B
�@�����ŒʐM�P�[�u�������H���Ď��ۂɎg���R�s�������̃R�l�N�^�ɂ��Ă��̌��ʃ{�[�h�̕���
�R�s���̃R�l�N�^�ɂȂ�܂����B