// LCDに文字を表示
// Notes: 4MHz内部クロック
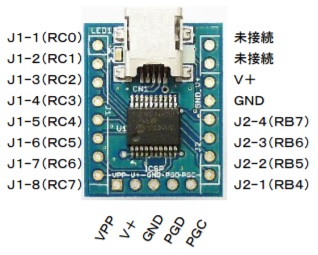
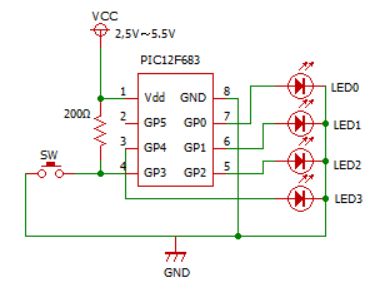
// PORTC(3) : LCD(DB7)14 PORTC(4) 6 : LCD_EN 6
// PORTC(2) : LCD(DB6)13 GND : LCD_RW 5
// PORTC(1) : LCD(DB5)12 PORTC(5) 5 : LCD_RS 4
// PORTC(0) : LCD(DB4)11 CONTRAST ADJ: LCD_Vo 3
// +5v : LCD(Vdd) 2
// GND : LCD(Vss) 1
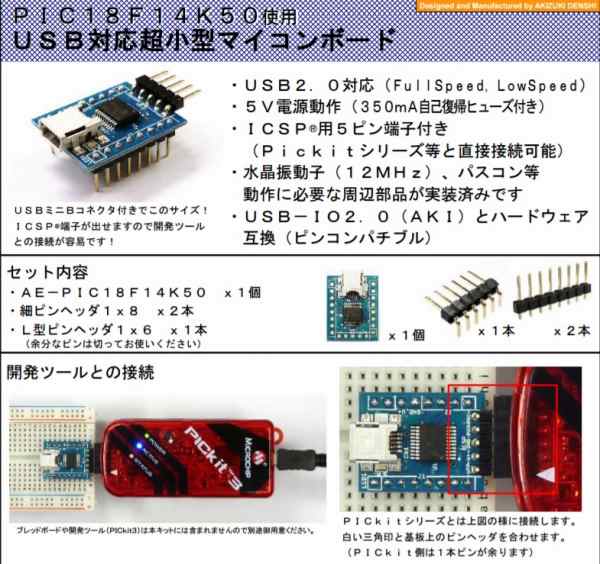
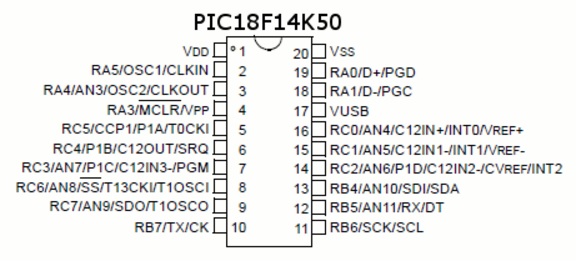
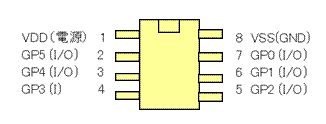
// Target: PIC18F14K50
#include
#define _XTAL_FREQ 4000000
#define LCD LATC
#define LCD_E LATCbits.LATC4
#define LCD_RS LATCbits.LATC5
#define CTRL 0
#define MOJI 1
#pragma config FOSC = IRC // 内部クロック
#pragma config USBDIV = OFF, CPUDIV = NOCLKDIV
#pragma config IESO = OFF, FCMEN = OFF, PLLEN = ON
#pragma config BORV = 30, BOREN = OFF, PWRTEN = OFF
#pragma config WDTPS = 32768, WDTEN = OFF
#pragma config MCLRE = OFF, HFOFST = OFF, XINST = OFF
#pragma config BBSIZ = OFF, LVP = OFF, STVREN = ON
#pragma config CP1 = OFF, CP0 = OFF, CPD = OFF, CPB = OFF
#pragma config WRT1 = OFF, WRT0 = OFF, WRTB = OFF, WRTC = OFF
#pragma config EBTR1 = OFF, EBTR0 = OFF, EBTRB = OFF
void lcdOut(unsigned char cha,int mode,int bitMode)
{
unsigned char buf=0x00;
if(bitMode == 8){
LCD_E=0;
LCD=cha;
LCD_RS=0;
LCD_E=1;
__delay_us(20);
LCD_E=0;
}
else{
buf=(cha>>4);
LCD=buf;
if( mode == MOJI ) LCD_RS=1;
LCD_E=1;
__delay_us(20);
LCD_E=0;
if( mode == MOJI) LCD_RS=0;
__delay_us(20);//上位4bitと下位4bitの間
buf=cha;
LCD=buf;
if( mode == MOJI ) LCD_RS=1;
LCD_E=1;
__delay_us(20);
LCD_E=0;
if( mode == MOJI ) LCD_RS=0;
__delay_us(20);
}
}
void lcdInit(void)
{
__delay_ms(20);
lcdOut(0x03,0,8);
__delay_ms(4);
lcdOut(0x03,0,8);
__delay_ms(4);
lcdOut(0x03,0,8);//8bit mode
__delay_ms(4);
lcdOut(0x02,0,8);//4bit mode
__delay_ms(4);
lcdOut(0x08,CTRL,4);//2行表示モード
__delay_ms(4);
lcdOut(0x0c,CTRL,4);//表示設定
__delay_ms(4);
lcdOut(0x06,CTRL,4);//entry mode
__delay_ms(4);
lcdOut(0x01,CTRL,4);//cler
__delay_ms(20);
}
void lcdPos(int x, int y)
{
if( y == 1) lcdOut(0x80+x,CTRL,4);
else lcdOut(0xC0+x,CTRL,4);
}
void lcdDsp(unsigned char *str,int x, int y)
{
unsigned char *ad=0;
LCD_RS=0;
lcdPos(x,y);
__delay_ms(2);
ad=str;
while(*ad)
{
lcdOut(*ad,MOJI,4);
ad++;
}
}
void main(void){
OSCCON = 0b01010010; // 内部クロック4Mhz
LATC = 0; // PortCのすべてのビットを「0」
TRISC = 0b00000000; // ポートを出力に設定
lcdInit();//初期化
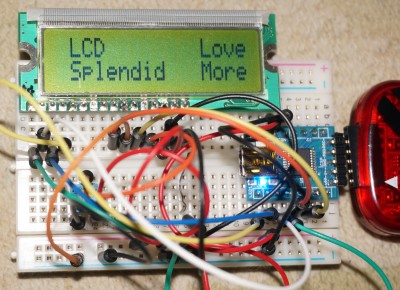
lcdDsp("LCD",1,1);
lcdDsp("Love",12,1);
lcdDsp("Splendid",1,2);
lcdDsp("More",12,2);
while(1);
}
|