پ@‚VƒZƒO•\ژ¦ٹي‚ح‚V‚آ‚جƒZƒOƒپƒ“ƒg‚ًژg‚ء‚ؤ‚O‚©‚ç‚X‚ـ‚إ‚جگ”ژڑ‚ً•\ژ¦‚·‚é‚à‚ج‚إ‚·پBƒAƒ‹ƒtƒ@ƒxƒbƒg‚à•\ژ¦‚إ‚«‚ـ‚·‚ھپB‚±‚ج‚VƒZƒO•\ژ¦ٹي‚ًگ§Œن‚·‚é‚ة‚حCMOS‚ج‚S‚T‚P‚P‚â‚S‚T‚S‚R‚ھژg—p‚³‚ê‚ـ‚·پB‚±‚جڈêچ‡پAA,B,C,D‚ج‚Sƒrƒbƒg‚ج“ü—حگMچ†‚ً‚O‚©‚ç‚X‚جگ”ژڑ‚ةƒfƒRپ[ƒh‚µ‚ؤ•\ژ¦‚µ‚ـ‚·پB‚±‚ê‚ًƒ}ƒCƒRƒ“‚إگ§Œن‚µ‚و‚¤‚ئ‚·‚é‚ئŒ…گ”‚ھڈ‚ب‚¢‚ئ‚«‚ح‚¢‚¢‚ج‚إ‚·‚ھپA‘½‚¢‚ئ”zگü‚ھ”ٌڈي‚ة•،ژG‚ة‚ب‚ء‚ؤ‚µ‚ـ‚¢‚ـ‚·پB3Œ…‚إ‚à‘ه•د‚إ‚·پB
#include<16f84a.h>
#fuses HS,NOWDT,PROTECT
#use delay(CLOCK=20000000)
#byte RA=5
#byte RB=6
#bit RS=RA.4
//CPU wait
#define CL_WAIT 49
#define ON 1
#define OFF 0
#define HI 1
#define LOW 0
int j,x;
void display_clear(int f) پ@پ@پ@پ@//3Œ…‚ج7¾¸قپA‹y‚رؤق¯ؤ‚ًڈء“”‚³‚¹‚é
پ@پ@{ for (j=0;j<24;j++)
پ@پ@پ@ {
پ@پ@پ@پ@ x=f;پ@پ@پ@
پ@پ@پ@پ@ x&=0x01;پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ //x‚ئ01‚جک_—گد‚ًx‚ة“ü‚ê‚é
پ@پ@پ@پ@ output_low(PIN_A1); پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ // CK
پ@پ@پ@پ@ output_bit(PIN_A0,x);پ@پ@پ@پ@پ@پ@پ@پ@ //DT A0‚ة0–”‚ح1‚جx‚ً
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ //ڈo—ح‚·‚é(serial out)
پ@پ@پ@پ@ output_high(PIN_A1);
پ@پ@پ@پ@ output_low(PIN_A0);
پ@پ@پ@پ@ f>>=1; پ@ پ@پ@پ@پ@ پ@پ@پ@//f‚ً1ثق¯ؤ‰E¼جؤ(serial out‚جڈ€”ُ)
پ@پ@پ@پ@}پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@
پ@پ@پ@output_high(PIN_A3); پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ پ@پ@ // EN
پ@پ@پ@delay_ms(5);
پ@پ@پ@output_high(PIN_A2); پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ پ@پ@ // LT
پ@پ@پ@output_low(PIN_A2);
پ@پ@پ@output_low(PIN_A3);
پ@پ@پ@delay_ms(10);}
/*********************** DISPLAY ROUTINE********************/
void display(int f) پ@پ@پ@پ@پ@پ@پ@ پ@پ@ //طس؛ف‚©‚ç‚جگ”’lf‚ً•\ژ¦‚·‚é
پ@پ@{ RA=0x10;پ@پ@ پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@// RA4‚ج‚ف“ü—حخك°ؤ
پ@پ@پ@for (j=0;j<8;j++)پ@پ@پ@پ@پ@پ@پ@پ@پ@ //7¾¸قپAؤق¯ؤ‚ج8ثق¯ؤ‚جأق°ہ
پ@پ@پ@{ پ@x=f;پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ پ@پ@پ@پ@//f‚ح8ثق¯ؤتق²إط°أق°ہ
پ@پ@پ@پ@پ@x&=0x01;پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//f‚جچإ‰؛ˆتثق¯ؤ‚ئ1‚جAND‚ً‚ئ‚é
پ@پ@پ@پ@پ@output_low(PIN_A1); پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ پ@پ@پ@//CK
پ@پ@پ@پ@پ@output_bit(PIN_A0,x); پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ //DT
پ@پ@پ@پ@پ@output_high(PIN_A1);
پ@پ@پ@پ@پ@output_low(PIN_A0);
پ@پ@پ@پ@پ@f>>=1;
پ@پ@پ@}
پ@پ@پ@output_high(PIN_A3); پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ پ@پ@پ@ //EN
پ@پ@پ@delay_ms(5);
پ@پ@پ@output_high(PIN_A2); پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ پ@پ@پ@//LT
پ@پ@پ@output_low(PIN_A2);
پ@پ@پ@output_low(PIN_A3);
پ@پ@پ@delay_ms(400);
void main()
پ@پ@پ@{
پ@پ@پ@پ@int ird[32],i,gcount,p_count,f,j,x;
پ@پ@پ@پ@set_tris_a(0x10); پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//A4‚ج‚ف“ü—ح
پ@پ@پ@پ@set_tris_b(0x00);
پ@پ@while(1)
پ@پ@پ@{
پ@پ@پ@پ@gcount=0;
پ@پ@پ@پ@while(gcount <100)
پ@پ@پ@پ@{ پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//9.9msŒo‰ك‚·‚é‚ـ‚إ‚جٹش‚ة
پ@پ@پ@پ@پ@if(RS==HI) پ@پ@پ@پ@پ@پ@پ@//RA4‚ج“ü—ح‚ھ1‚إIrگMچ†‚ج‚ب‚¢‚ئ‚«
پ@پ@پ@پ@پ@{ delay_us(100);
پ@پ@پ@پ@پ@پ@gcount++;}پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ //¶³فؤ±¯جك‚µ
پ@پ@پ@پ@پ@else { gcount=0;}پ@پ@پ@پ@ پ@پ@ //RA4=0‚ئ‚ب‚ê‚خ¶³فؤ¸ط±‚·‚é
پ@پ@پ@پ@}پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@
پ@پ@پ@پ@while(RS==HI){ }
پ@پ@پ@پ@while(RS==LOW){ }
پ@پ@پ@پ@while(RS==HI){ }
پ@پ@پ@پ@for(i=0;i<=31;i++) پ@پ@//ژَگMثق¯ؤگ”32‚¾‚ھif•¶‚جءھ¯¸‚ح24ثق¯ؤ
پ@پ@پ@پ@پ@{p_count=0;
پ@پ@پ@پ@پ@ while(RS==LOW){ }
پ@پ@پ@پ@پ@ while(RS==HI) پ@پ@ //“ü—ح1‚إ30¶³فؤ‚µ‚»‚جژ‚جأق°ہ‚ًژوچ‚ق
پ@پ@پ@پ@پ@ پ@{ delay_us(CL_WAIT);
پ@پ@پ@پ@پ@پ@پ@ p_count=p_count+1;
پ@پ@پ@پ@پ@پ@پ@ if( p_count > 23 ) پ@پ@پ@پ@پ@// 24*49=1176پà1200uSec
پ@پ@پ@پ@پ@پ@پ@پ@ {ird[i] = 1;}پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ //1200uˆبڈم‚ب‚ç1
پ@پ@پ@پ@پ@پ@پ@ else
پ@پ@پ@پ@پ@پ@پ@پ@ {ird[i] = 0;}پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ //1200uˆب‰؛‚ب‚ç0
پ@پ@پ@پ@پ@پ@ }
پ@پ@پ@}
/*****************ژَگMگMچ†‚ئ7ƒZƒOƒGƒŒƒپƒ“ƒg‚جٹضŒW***************/
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0 && ird[4]==0 && ird[5]==0 && ird[6]==0 && ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0 && ird[11]==0 && ird[12]==1 && ird[13]==1 && ird[14]==0 && ird[15]==0 && ird[16]==1 && ird[17]==0 && ird[18]==0&&ird[19]==0 && ird[20]==1 &&پ@ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@ پ@{display(0b11111100);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//0
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0
&& ird[4]==0 && ird[5]==0 && ird[6]==0 &&
ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0
&& ird[11]==0 && ird[12]==1 && ird[13]==1 &&ird[14]==0
&& ird[15]==0 && ird[16]==0 && ird[17]==0 &&
ird[18]==1&&ird[19]==0 && ird[20]==0 && ird[21]==0
&& ird[22]==0 &&پ@ird[23]==0)
پ@پ@پ@پ@{display(0b01100000);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//1
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0
&& ird[4]==0 && ird[5]==0 && ird[6]==0 &&
ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0
&& ird[11]==0 && ird[12]==1 && ird[13]==1 &&
ird[14]==0 && ird[15]==0 && ird[16]==1 && ird[17]==0
&& ird[18]==1&&ird[19]==0 && ird[20]==0 &&
ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@پ@پ@{display(0b11011010);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//2
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0 && ird[4]==0 && ird[5]==0 && ird[6]==0 && ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0 && ird[11]==0 && ird[12]==1 && ird[13]==1 && ird[15]==0 && ird[16]==0 && ird[17]==1 && ird[18]==1 && ird[19]==0&&ird[20]==0 && ird[21]==0 && ird[22]==0 && ird[23]==0 )
پ@پ@پ@پ@{display(0b11110010);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//3
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0
&& ird[4]==0 && ird[5]==0 && ird[6]==0 &&
ird[7]==1&& ird[8]==1 && ird[9]==0 && ird[10]==0
&& ird[11]==0 && ird[12]==1 && ird[13]==1 &&
ird[14]==0 && ird[15]==0 && ird[16]==0 && ird[17]==0
&& ird[18]==0&&ird[19]==1 && ird[20]==0 &&
ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@پ@پ@{display(0b01100110);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//4
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0
&& ird[4]==0 && ird[5]==0 && ird[6]==0 &&
ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0
&& ird[11]==0 && ird[12]==1 && ird[13]==1 &&
ird[14]==0 &&ird[15]==0 && ird[16]==1 && ird[17]==0
&& ird[18]==0 &&ird[19]==1 && ird[20]==0 &&
ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@پ@پ@{B2=ON;B0=ON; display(0b10110110);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//5
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0 && ird[4]==0 && ird[5]==0 && ird[6]==0 && ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0 && ird[11]==0 && ird[12]==1 && ird[13]==1 && ird[14]==0 && ird[15]==0 && ird[16]==0 && ird[17]==1 && ird[18]==0&&ird[19]==1 && ird[20]==0 && ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@پ@پ@{display(0b00111110);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//6
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0
&& ird[4]==0 && ird[5]==0 && ird[6]==0 &&
ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0
&& ird[11]==0 && ird[12]==1 && ird[13]==1 &&
ird[14]==0 && ird[15]==0 && ird[16]==0 && ird[17]==0
&& ird[18]==1&&ird[19]==1 && ird[20]==0 &&
ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@پ@پ@{display(0b11100000);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//7
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0
&& ird[4]==0 && ird[5]==0 && ird[6]==0 &&
ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0
&& ird[11]==0 && ird[12]==1 && ird[13]==1 &&
ird[14]==0 && ird[15]==0 && ird[16]==1 && ird[17]==0
&& ird[18]==1&&ird[19]==1 && ird[20]==0 &&
ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@پ@پ@{display(0b11111110);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//8
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0
&& ird[4]==0 && ird[5]==0 && ird[6]==0 &&
ird[7]==1پ@&& ird[8]==1 && ird[9]==0 && ird[10]==0
&& ird[11]==0 && ird[12]==1 && ird[13]==1 &&
ird[14]==0 && ird[15]==0 && ird[16]==0 && ird[17]==1
&& ird[18]==1&&ird[19]==1 && ird[20]==0 &&
ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@پ@پ@{display(0b11100110);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//9
if(ird[0]==1 && ird[1]==1 && ird[2]==1 && ird[3]==0 && ird[4]==0 && ird[5]==0 && ird[6]==0 && ird[7]==1 && ird[8]==1 && ird[9]==0 && ird[10]==0 && ird[11]==0 && ird[12]==1 && ird[13]==1 && ird[14]==0 && ird[15]==0 && ird[16]==1 && ird[17]==0 && ird[18]==1&&ird[19]==0 && ird[20]==1 && ird[21]==0 && ird[22]==0 && ird[23]==0)
پ@پ@پ@پ@{display_clear(0b00000000);} پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@//چيڈœ
پ@پ@}
}پ@
پ@ƒgƒbƒvƒyپ[ƒW‚ض–ك‚éپ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@
پ@ƒٹƒ‚ƒRƒ“‚©‚ç“ü—ح‚µ‚½گ”ژڑ‚حIrDa‚إژَگM‚µRA4‚ة“ü—ح‚³‚ꂽ‚à‚ج‚ًƒfƒRپ[ƒh‚µ‚ـ‚·پBƒfƒRپ[ƒh‚³‚ꂽگMچ†‚حRA0‚©‚çƒVƒٹƒAƒ‹‚ةڈo—ح‚³‚êƒVƒtƒgƒŒƒWƒXƒ^پ[‚ة‘—‚ç‚ê‚ؤ‚¢‚«‚ـ‚·پBƒVƒtƒgƒŒƒWƒXƒ^پ[‚ة•K—v‚بƒNƒچƒbƒNپAƒCƒlپ[ƒuƒ‹پAƒ‰ƒbƒ`‚حRA1,RA3,RA‚Q‚©‚çڈo—ح‚µ‚ـ‚·پBMBI5001‚حMacroblock‚ئ‚¢‚¤ƒپپ[ƒJپ[‚ج‚à‚ج‚إ8ƒrƒbƒgƒVƒٹƒAƒ‹ƒAƒEƒg‚ھ‚ ‚é‚ج‚ھ“ء’¥‚إ’è“d—¬LEDƒhƒ‰ƒCƒo‚إ‚·پB74HC164‚جƒVƒٹƒAƒ‹ƒAƒEƒg‚آ‚«‚ئ‚¢‚ء‚½‚ئ‚±‚ë‚إ‚·پB‘½’iگع‘±‚ة‚ح•ض—ک‚إ‚·پB
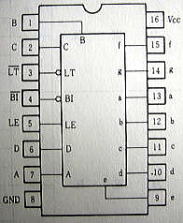

74HC4511
پ@‚±‚±‚إژg—p‚µ‚½گشٹOگüƒٹƒ‚ƒRƒ“‚ح“d‹CٹX‚إ“üژ肵‚½ƒWƒƒƒ“ƒN•i‚إ‚µ‚½‚ھپAژc”O‚ب‚ھ‚çژ茳‚ةژc‚ء‚ؤ‚¢‚ـ‚¹‚ٌپB‚»‚ج‚½‚ك‚±‚جƒٹƒ‚ƒRƒ“‚إ‚جƒfƒoƒbƒO‚ھ‚إ‚«‚ب‚¢ڈَ‘ش‚ة‚ب‚ء‚ؤ‚¢‚ـ‚·پBƒpƒiƒ\ƒjƒbƒN‚جƒٹƒ‚ƒRƒ“ژg—p—ل‚ھPIC‚ًژg‚ء‚½ژ©چىڈW‚جƒeƒŒƒr‚جگشٹOگüƒٹƒ‚ƒRƒ“‚إƒ‚پ[ƒ^پ[گ§Œن‚ة‹Lچع‚µ‚ؤ‚¢‚ـ‚·‚ج‚إپA‚»‚؟‚ç‚àژQچl‚ة‚µ‚ؤ‚‚¾‚³‚¢پB‚±‚ê‚ç‚جچׂ©‚¢ƒ^ƒCƒ~ƒ“ƒO‚ة‚آ‚¢‚ؤ‚حƒ\پ[ƒXƒٹƒXƒg‚ً‚²——‚‚¾‚³‚¢پBAƒ|پ[ƒg‚حRA4‚ھ“ü—ح‚إپA‘¼‚حڈo—ح‚إ‚·پBBƒ|پ[ƒg‚حژg—p‚µ‚ـ‚¹‚ٌ‚ج‚إڈo—حƒ‚پ[ƒh‚ة‚µ‚ؤ‚¢‚ـ‚·پBƒپƒCƒ“ƒ‹پ[ƒ`ƒ“‚جwhile(1)‚جچإڈ‰‚ج•”•ھ‚حƒٹƒ‚ƒRƒ“‚جIRگMچ†‚ًŒںڈo‚·‚é‚à‚ج‚إ‚·پBRS‚حIR‚جژَŒُƒ†ƒjƒbƒg‚جڈo—حپA‘¦‚؟RA4‚ج“ü—ح‚إ•پ’i‚حH‚إ‚·پBIRƒٹƒ‚ƒRƒ“‚جگMچ†‚ًژَگM‚·‚é‚ئ‚S‚آ‚جwhile•¶‚إƒٹƒ‚ƒRƒ“‚جگMچ†‚إ‚ ‚邱‚ئ‚ًŒںڈo‚µ‚½ŒمپAگ”ژڑ‚جƒRپ[ƒh‚ً”z—ٌ‚ةژو‚èچ‚ٌ‚إ‚¢‚«‚ـ‚·پBL‚جƒpƒ‹ƒX•‚ح–ٌ400uSecپAH‚جƒpƒ‹ƒX•‚ح–ٌ1600uSec‚إ‚·‚ج‚إپA—]—T‚ً‚ف‚ؤ–ٌ1200uSec‚ً”»’èڈًŒڈ‚ة‚µ‚ؤ‚¢‚ـ‚·پB
پ@‚V‚آ‚جƒZƒOƒپƒ“ƒg‚ئƒhƒbƒg‚ًٹـ‚ك‚½‚W‚آ‚ج—v‘f‚ةŒ©—§‚ؤ‚ؤƒ}ƒCƒRƒ“‚إƒVƒٹƒAƒ‹‚ةگ§Œن‚µ‚ؤ‚â‚é‚ئچ\‘¢‚àٹب’P‚إ‘½Œ…‚ة‚à‘خ‰‚µ‚â‚·‚‚ب‚è‚ـ‚·پB‚»‚جˆê‚آ‚ئ‚µ‚ؤƒVƒtƒgƒŒƒWƒXƒ^پ[‚ًژg—p‚·‚é‚à‚ج‚ھ‚ ‚è‚ـ‚·پB‚±‚±‚إگ»چى‚µ‚½‚ج‚ح‚RŒ…•\ژ¦‚·‚é‚à‚ج‚إPIC16F84A,ƒVƒtƒgƒŒƒWƒXƒ^پ[‚حMBI5001‚ًژg—p‚µگ”ژڑ‚ج“ü—ح‚حIrDaƒٹƒ‚ƒRƒ“‚إچs‚¢پA‚»‚جگMچ†‚ًژَگM‚·‚é‚à‚ج‚إ‚·پB
پ@