丂USART偼Universal Synchronous Asynchronous Receiver Transmitter偺棯徧偱摨婜幃
偲旕摨婜幃偑偁傝傑偡偑丄偙偙偱偼旕摨婜幃偵偮偄偰専摙偟傑偟偨丅旕摨婜幃偼挷曕摨婜
捠怣曽幃偲傕尵傢傟偰偄傑偡丅僼僅乕儅僢僩偼壓恾偺傛偆偵側偭偰偄傑偡丅

丂丂丂丂僗僞乕僩價僢僩丂丂倐0丂丂 倐侾丂丂 倐俀丂丂 倐俁丂丂 倐係丂丂 倐俆丂丂 倐俇丂丂 倐俈丂丂丂 僗僩僢僾價僢僩
丂捠怣偺専徹偼PIC16F84A偲PIC16F18857偺2庬椶偱C尵岅傪巊梡偟慜幰偼CCS丄屻幰偼
xc-8傪,僞乕儈僫儖僜僼僩偼TeraTermd傪巊梡偟傑偟偨丅
偳偪傜傕PIC偐傜RS232C偱PC偵擖椡傪懀偡儊僢僙乕僕傪憲傝丄PC偱擖椡偡傞偲PIC偱偙傟傪
敾暿偟懳墳偟偨撪梕傪PC偺儌僯僞忋偵昞帵偡傞偲偄偆傕偺偱偡丅
PIC16F84A偺CCS偺僜乕僗偼壓婰偱偡丅
#include <16f84a.h>
#fuses HS,NOWDT,NOPROTECT
#use delay(CLOCK=10000000)
#use rs232(BAUD=19200,XMIT=PIN_A3,RCV=PIN_A2)
void main()
丂{
丂丂丂int keyin,i;
丂丂丂while(1)
丂丂丂{丂丂 printf("\r\nKeyInput= ");丂丂丂 ;擖椡傪懀偡昞帵
丂丂丂丂丂丂keyin=getc();
丂丂丂丂丂丂if(keyin=='A' || keyin=='a')丂丂 ;A枖偼a傪擖椡
丂丂丂丂丂丂{ for(i='A';i<0x46;i++)丂丂丂丂丂;ABCDE傪昞帵
丂丂丂丂丂丂丂printf("%C",i); }
丂丂丂丂丂丂else
丂丂丂丂丂丂{丂if(keyin=='S' || keyin=='s')丂;S枖偼s傪擖椡
丂丂丂丂丂丂丂丂{丂for(i='0';i<0x34;i++)丂丂 ;123傪昞帵
丂丂丂丂丂丂丂丂丂丂printf("%C",i);丂}
丂丂丂丂丂丂else
丂丂丂丂丂丂丂丂printf("OUT");丂}丂丂丂丂丂丂;OUT傪昞帵
丂丂丂}
丂}
丂RS232偺愝掕偼#use偱峴偄傑偡丅偙傟傪僐儞僷僀儖偟幚峴偡傞偲丄PC偵"KeyInput="偲昞
帵偝傟傞偺偱"A"枖偼"a"傪擖椡偡傞偲A偐傜E傑偱昞帵偟丄"S"枖偼"s"傪擖椡偡傞偲0偐傜
3傑偱昞帵偟傑偡丅偦偺懠偺暥帤傪擖椡偡傞偲"OUT"偑昞帵偝傟傞傛偆偵側偭偰偄傑偡丅
丂摨偠偙偲傪偝偣傞偨傔偺xc-8偱婰弎偝傟偨PIC16F18857偺僜乕僗偼埲壓偺偲偍傝偱偡丅
#include <stdio.h>
int i;
char nyu,hyouji;
char Msg[]="\r\nKeyInput=";
void main()
{ 丂SYSTEM_Initialize();
丂丂INTERRUPT_GlobalInterruptEnable();
丂丂INTERRUPT_PeripheralInterruptEnable();
丂丂while(1)
丂丂{ i=0:
丂丂丂while(Msg[i]!=0)
丂丂丂丂EUSART_Write(Msg[i++]);
丂丂丂nyu=EUSART_Read();
丂丂丂if((nyu=='a')||(nyu=='A'))
丂丂丂丂{ for(hyouji='A';hyouji <='E;hyouji++)
丂丂丂丂丂EUSART丵Write(hyouji); }
丂丂丂else if((nyu=='s')||(nyu=='S'))
丂丂丂丂{ for(hyouji=='0';hyouji<='3';hyouji++)
丂丂丂丂丂EUSART_Write(hyouji); }
丂丂丂丂丂else
丂丂丂丂丂丂EUSART_Write('OUT')丂}
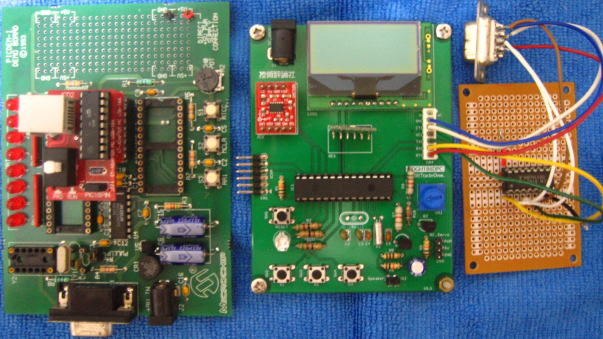
丂榑棟偼晧榑棟偵側偭偰偄傑偡丅PIC16F84A偱偼婎斅撪偵MAX232傪巊梡偟偰偄傞偺偱晧
榑棟偱偁傝丄偦偺傑傑偺弌椡偱椙偄偺偱偡偑丄PIC16F18857偱偼EUSART儌僕儏乕儖傪撪
憼偟偰偄傞偺偱偡偑弌椡偼惓榑棟偱偁傞偨傔僀儞僶乕僞乕夞楬傪晅壛偟傑偟偨丅擖椡懁偵
傕昁梫偱偡丅
丂丂丂丂丂