第5章 ステッピングモータを利用したリンク実験装置の開発
ロボット製作においてロボット競技の種目に適した動きを作り出すためには様々な機構や動力伝達方法を使わなければならない。従来の中学校技術分野「機械」領域においてもリンク機構は「動く模型の製作」で中心的に取り扱われてきた。中でも「てこクランク機構」はリンク機構の中でも広く利用されている。 リンク機構そのものは穴の開いた棒の組み合わせにすぎないので、厚紙と押しピンだけでも実験はできる。今回は、リンク機構をよりわかりやすく説明できる教具としてリンク実験装置(図28)を開発した。 製作したリンク実験装置は、2㎜厚塩化ビニール板(資料2参照)に4相ステッピングモータのP社製42SIM-24D8YB(図28-①)を取り付け、2㎜厚塩化ビニール板を加工した各リンク(図28-②、資料1参照)に、T社製「プーリーセット:ITEM70021」のブッシュ(図28-③)を組み合わせた。ステッピングモータは回転スピードが遅く、ステップごとの回転のコントロールが可能なので、リンク実験装置の動力部としては最適であると考えた。ただし、ステッピングモータはDCモータとは異なり、ただ単に電源を接続しただけでは回転しないので、コイルに流す電流を順次切り換える駆動回路(モータドライブ回路)が必要となってくる。製作したモータドライブ回路(図29)には正・逆転のスイッチ(SW1)、3・4相の切り換え(SW2)、回転速度のコントロール用に可変抵抗(VR)を取り付けた。なお、回路図では省略してあるが製作した基板には電源用スイッチを追加した。
|
| 図28 リンク実験装置 |
図29 ステッピングモータドライブ回路
表17 ステッピングモータドライブ回路基板部品表
| 番号 | 品 名 | 規 格 | 数量 | 参考単価 |
| ① | 基盤 | S社製・ICB-93S | 1 | 260 |
| ② | ステッピングモータ用IC | F社製・MB8713(PMM8713互換品) | 1 | 980 |
| ③ | タイマ用IC | NE555P | 1 | 80 |
| ④ | トランジスタ TR1~4 | ダーリントン型トランジスタ・2SD633 | 4 | 30 |
| ⑤ | ダイオード D1~D4 | 1Aシリコンダイオード・IS1588 | 4 | 15 |
| ⑥ | 電源用コネクタ | N社製2.5mmピッチNHコネクタ・2ピンL型プラグ | 1 | 15 |
| ⑦ | スイッチ | 1回路トグル型切り換えスイッチ | 3 | 100 |
| ⑧ | 抵抗 R1 | 1kΩ・1/4W | 1 | 5 |
| ⑨ | 抵抗 R2~R4 | 10kΩ・1/4W | 3 | 5 |
| ⑩ | 抵抗 R5~R8 | 100Ω・1/2W | 4 | 5 |
| ⑪ | 可変抵抗 VR | 1MΩ・B型 | 1 | 80 |
| ⑫ | セラミックコンデンサ C2 | 0.1μF | 1 | 20 |
| ⑬ | 電解コンデンサ C1 | 50V・1μF | 1 | 25 |
| ⑭ | 電解コンデンサ C3 | 50V・10μF | 1 | 25 |
| ⑮ | 電解コンデンサ C4 | 50V・33μF | 1 | 25 |
| ⑯ | 接続用端子 | T16:赤×1、黒×1、銀×4 | 6 | 40 |
| ⑰ | つまみ | MT15P | 1 | 70 |
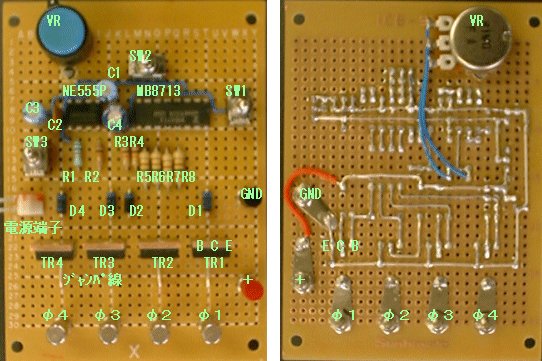 |
|
| 図30 ステッピングモータドライブ回路基板 |