サーボコントローラー
PIC16F84を使ったサーボコントローラー(試作品)です(写真1)。
使い方は、写真下部の2つ並んでいるボタンでプロポのスティックの役割をします。ちょっと見にくいのですが、右上のボタンを押すと瞬時にニュートラルが出ます。
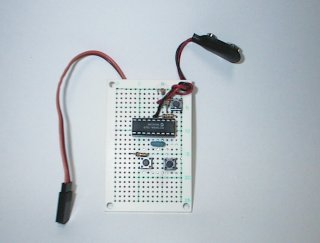
写真1
製作した目的は、ボイジャーEのモーターの馴らしを簡単に出来ないかと言うところから始まりました。当初、単3NiMH(ニッケル水素電池1200mA)を2本1組
にし、それを3組パラレルに接続してモーターにつなぎ、止まるまで回していました(写真2)。雑誌で単3アルカリ2本を使って馴らしが出来るという記事を読んで試してみたのですが、さすがに11〜12ターンダブル巻きのモーターでは役不足なようです。また、この方法では樹脂製の電池ボックスが熱で溶けてくるので電池ボックスの負担を軽くするために数を増やしました(より抵抗の少ないボックスを使えばよいのですが)。それと、アルカリ電池が安くなってきたとは言えまだまだ不経済なので、遊んでいたNiMH電池を使用しました。しかし、それでもまだかなり発熱するのであまりNiMH電池にも良くないと思います。また、この方法で十分モーターの馴らしが行えるのですが、構造上誤ってショートさせてしまう危険性があります。

写真2
いつショートさせてしまうかハラハラするより何か良い方法がないか考えていると、ふと余っているボイジャーE用のスピードコントローラー(NEA−300H)が目に付きました。これを利用して出来ないかと思い製作にかかりました。同じ作るならモーターの馴らしにしか使えないのも面白くないのでサーボのニュートラルも出せるようにしました。
特徴は以下の通りです。
1.スピードコントローラーを使用してモーターの馴らしが出来る。
2.プロポを使わないでサーボの動作チェックを行える。
3.プロポを使わないでサーボのニュートラルを出せる。
4.以上のことがプロポ一式を使わないので電波を出さないでできる。
といったところです。やはり1番の特徴は4.でしょう。
写真3はモーターの馴らし中の様子です。モーター用のスピードコントローラーを使用した場合、電源は動力用のNiCdからとるので、別に受信機用バッテリーをつなぐ必要はありません。(スナップには何も繋がない。)
実際のモーターの馴らしの方法は、スピードコントローラー、サーボコントローラー、モーター、バッテリー(8.4V2400mAを使用)を繋ぎ、まずスピードコントローラーにスロットルスティックの最低時(最スロー)と最高時(フルスロットル)の位置を登録します。300Hの場合は数秒間スイッチを押すとLEDが1回点滅になりますので、この位置に最低値を登録します(サーボコントローラーは電源投入時自動に最低位置になります)。次にもう一度スピードコントローラーのスイッチを押すと2回点滅に変わりますので、この時点で最高値を登録します。サーボコントローラーはニュートラルから最高値あたりで登録します。もう一度スピードコントローラーのスイッチを押すと連続点滅になり、通常の起動直後の状態になります。このままスピードコントローラーのスイッチを押すとモーターが高速で回り出しますので、必ずサーボコントローラーを最低値にするか、一度電源を入れ直すようにします。
モーターが回る状態にし、サーボコントローラーのUpスイッチをチョンと押し、モーターを回します。1回か2回のチョン押しで良いかと思います。このままバッテリーが無くなるまで回します。コミュ及びブラシの状態を確認し、終了です。
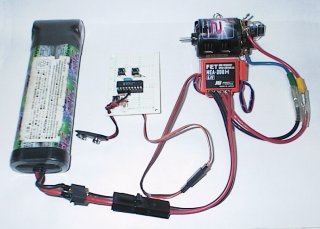
写真3
PICの部屋Topに戻る