DCモータの回転制御から、フィードバック制御(PID制御)を理解します。
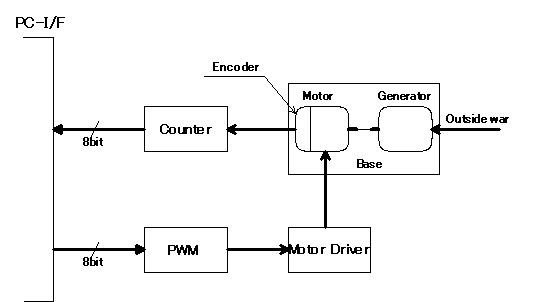
(1)Motor
制御対象のモータです。
(2) Encoder
モータの回転に合わしてパルスを発生します。
(3) A/D Converter
一定時間内のエンコーダからのパルスをカウントしてモータの回転数を測定します。
(4) PWM
PC-I/Fからの制御データによりモータの回転時間を制御します。
(5)Motor-Driver
PWMの制御信号によりモータを制御します。
(6)Generator
モータの負荷として利用します。
(7)Outside war
モータへの外乱を加える時利用します。
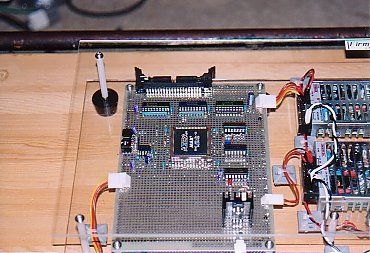
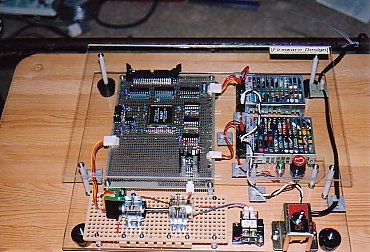
(1) 制御装置
実習装置の制御部分です。
手前の部分が、モータコントロール用のドライバです。奥の部分が、PWM関係です。
装置の右側は、電源関係です。
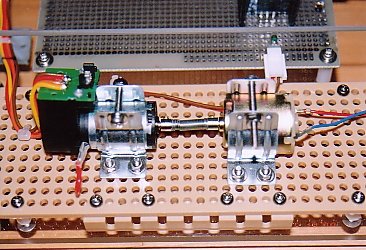
(2) ターゲットユニット
ターゲットのモータユニットです。左側のモータを回転制御しています。右側のモータは、負荷に使用しています。
(1) OS
Windows95/98とします。(Windows-NTは、不可)
(2) 設定項目
・目標回転数
・比例係数(Kp),積分時間(Ti),微分時間(Td)
・測定サンプリング時間
(3) 付加機能
・計測回転数の結果をグラフ表示/印字
・計測データの保存/読込み
(1)メイン画面
計測データのグラフ、設定パラメータの表示をします。
(2)パラメータ設定
各種パラメータを設定します。
サンプルデータより本装置の仕様を参考にして頂ければ幸いです。
サンプルデータと表示プログラム